|
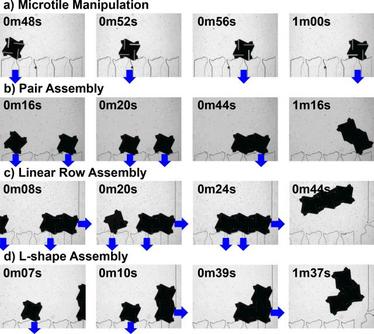
A major challenge in fluidic assembly is the dynamically programmable fabrication of arbitrary geometries from basic components. Current approaches require predetermination of either the assembly machinery or the component interfaces for the specific target geometries. This research persues an alternative concept that exploits self-assembly forces locally but directs these forces globally, allowing fabrication and manipulation of target structures without tailoring the substrate or interfaces. By controlling the flow in a microfluidic chamber, components are directed to their target locations where local interactions align and bond them. Following this approach, we have so far demonstrated the experimental assembly of structures composed of two to ten components.
|
|
|
|
|
|
Stochastic Assembly of Minimalistic Modules
Imagine thousands of little building blocks autonomously assembling into any shape you want; that's the idea behind Programmable Matter: A substance that is able to change its physical properties (e.g. shape, stiffness, color) as directed by the user. This idea has been around in science fiction for a long time, think of the Terminator, or the Sandman in Spiderman 3 who can both repair themselves and assume different shapes (the Terminator is analog and the Sandman is made of a digital material).
|
Outside the movies, Programmable Matter systems could have real-world advantages: Objects can be assembled or repaired on-the-fly, and deconstructed to be recycled into new objects once they are no longer needed. Programmable matter would open up new possibilities for rapid prototyping, space exploration, sustainable technology, and evolutionary design. In our work, we focuses on shape-programmability with the goal of developing modules from which self-reconfigurable structures can be built. Our approach to programmable matter involves the assembly of components with embeded electronics by manipulating the flow of fluid through an assembly chamber. The fluidic environment makes this approach inherently stochastic, requiring new assembly
Our work so far has focussed on developing centimeter scale modules that contain the mechanical and electrical functionality needed for controlled self-assembly. Further, we have develped a C++ based simulator to develop control strategies capable of dealing with the stochasticity in the assembly environment. In this project, the construction of programmable shapes is attempted with minimalistic modules. This means, that the cube shaped modules have no active components. Through controlling flow in and out of flow sinks and sources on a substrate at the bottom of a water tank, modules can be manipulated to assemble into shapes. We have shown assembly of up to four modules and the repair of preexisting structures that have been damaged as shown in the image sequences below. |
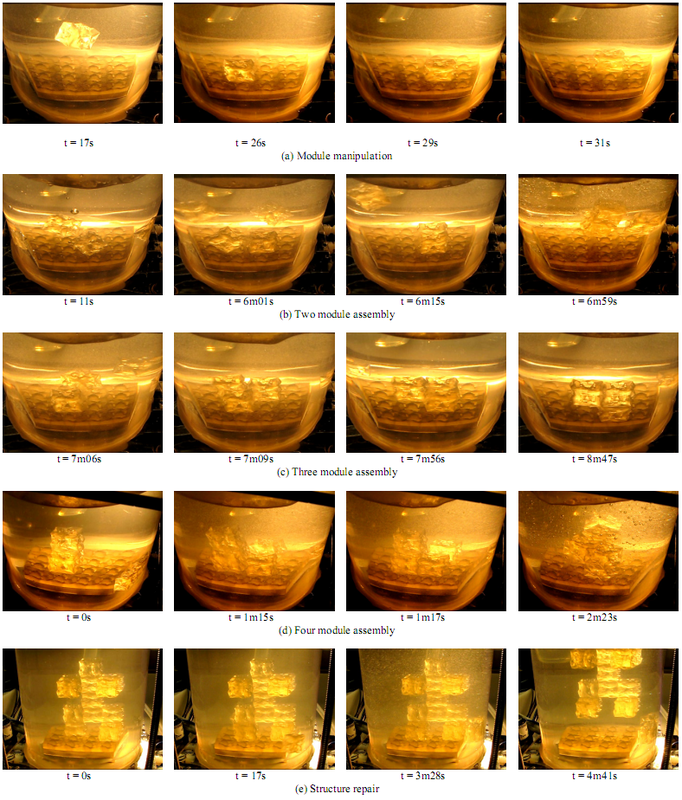
Figure: Assembly sequences (taken from videos): (a) Cube manipulation. (b) Two cube assembly. (c) Three cube assembly. (d) Four cube assembly. (e) Repair of a damaged pre-existing structure
|
Stochastic Assembly Simulation
|
|
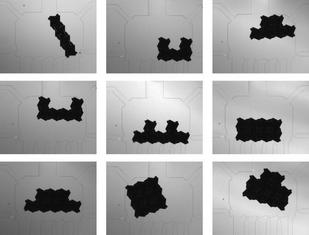
Attempting self-assembly of a shape in a fluid environment (i.e. “under water”) introduces stochasticity into the process. Because the assembly process relies on new modules arriving at the required position autonomously, one cannot know in advance, when a module arrives. This makes the decision, in which sequence to attract new modules by flow-modulation non-trivial.
We are using a custom C++ simulator based on the Open Dynamics Engine (ODE) to model the stochastic interactions of 3D components in a fluidic environment. Simplified fluidic forces are applied to the components in order to obtain a computationally-efficient simulation. Movie 1: Strategies for Stochastic Fluidic Assembly. This video (with narration) describes the development of our custom, computationally efficient stochastic fluidic assembly simulator. This simulator was then used to develop a set of assembly strategies to compensate for the unpredictable module availability. Please see our paper in IEEE Transactions on Robotics for details. Movie 2: Simulation: Fluidic assembly and reconfiguration. This simulation demonstrates the fluidic assembly of 3D cubes into an initial C-shape and the subsequent reconfiguration of this assembly into a U-Shape. Components are attracted by opening sinks on the bottom of the chamber. Once a component is attached, it opens internal valves to direct the fluid flow and attract new components where they are needed to assemble the target structure. |
learn more |
See pub,lications below
|
Project participants |
Michael Tolley, Mekala Krishnan, David Erickson, Hod Lipson
|
Related Publications |
|
