|
The field of Artificial Life examines "life as it could be" based on understanding the principles and simulating the mechanisms of real biological forms. Just as airplanes use the same principles as birds, but have fixed wings, artificial lifeforms may share the same principles, but not the same implementation in chemistry. Every feature of living systems seems wondrous until it is understood: Stored energy, autonomous movement, and even animal communication are no longer miracles, as they are replicated in toys using batteries, motors, and computer chips.
Complex biological forms reproduce by taking advantage of an arbitrarily complex set of auto-catalyzing chemical reactions. Biological life is in control of its own means of reproduction, and this autonomy of design and manufacture is a key element which has not yet been understood or reproduced artificially. To this date, robots - a form of artificial life - are still designed laboriously and constructed by teams of human engineers at great cost. Few robots are available because these costs must be absorbed through mass production that is justified only for toys, weapons, and industrial systems like automatic teller machines. |
|
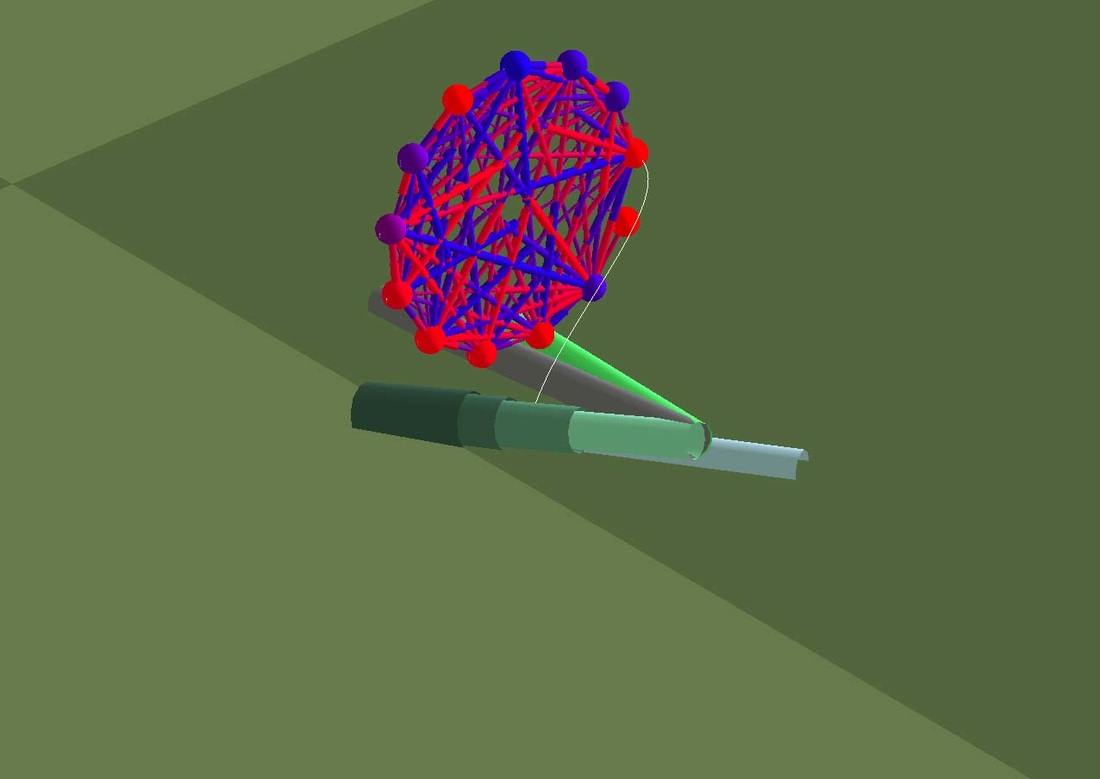
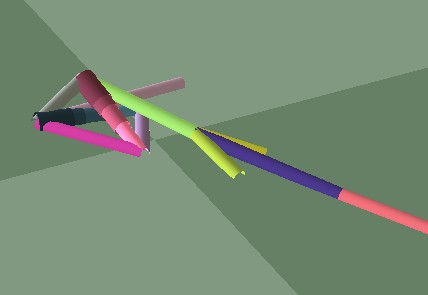
In the Golem project (Genetically Organized Lifelike Electro Mechanics) we conducted a set of experiments in which simple electro-mechanical systems evolved from scratch to yield physical locomoting machines. Like biological lifeforms whose structure and function exploit the behaviors afforded by their own chemical and mechanical medium, our evolved creatures take advantage of the nature of their own medium - thermoplastic, motors, and artificial neurons. We thus achieve autonomy of design and construction using evolution in a limited universe physical simulation, coupled to off-the-shelf rapid manufacturing technology. This is the first time robots have been robotically designed and robotically fabricated.
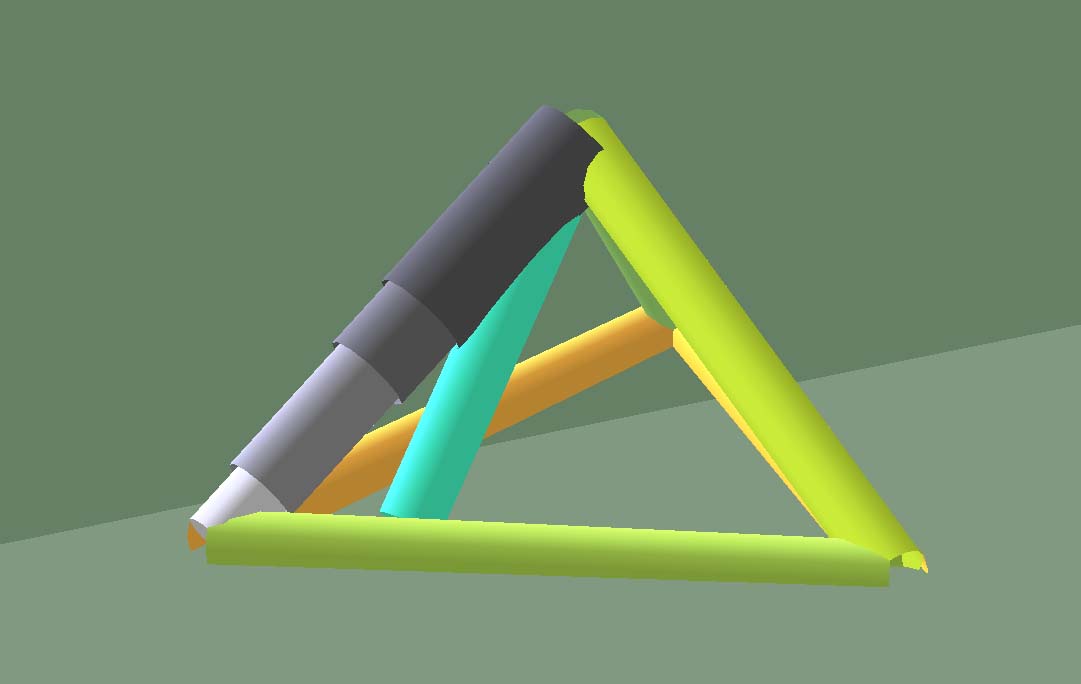
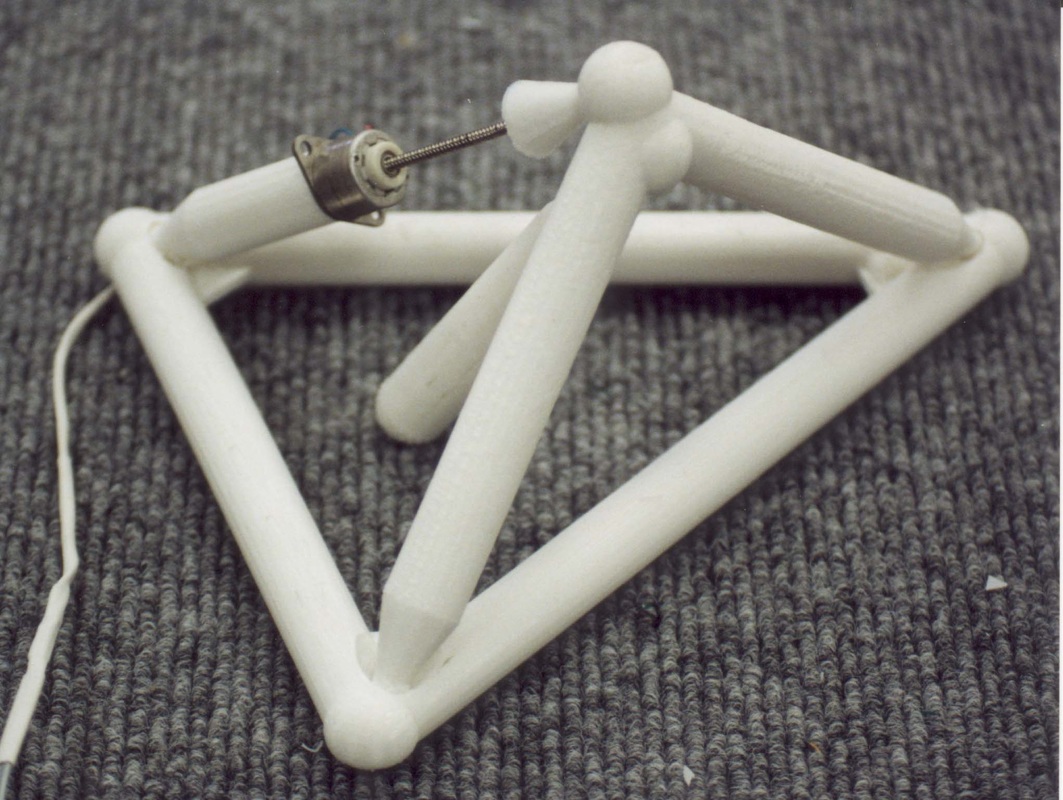
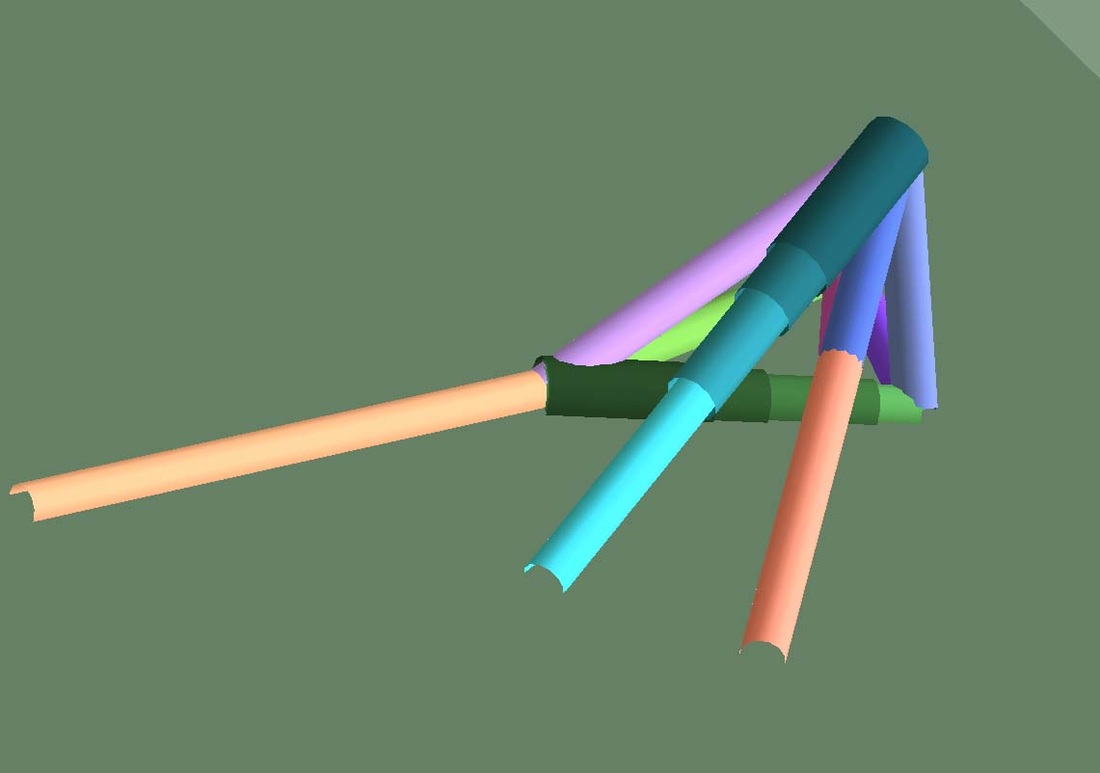

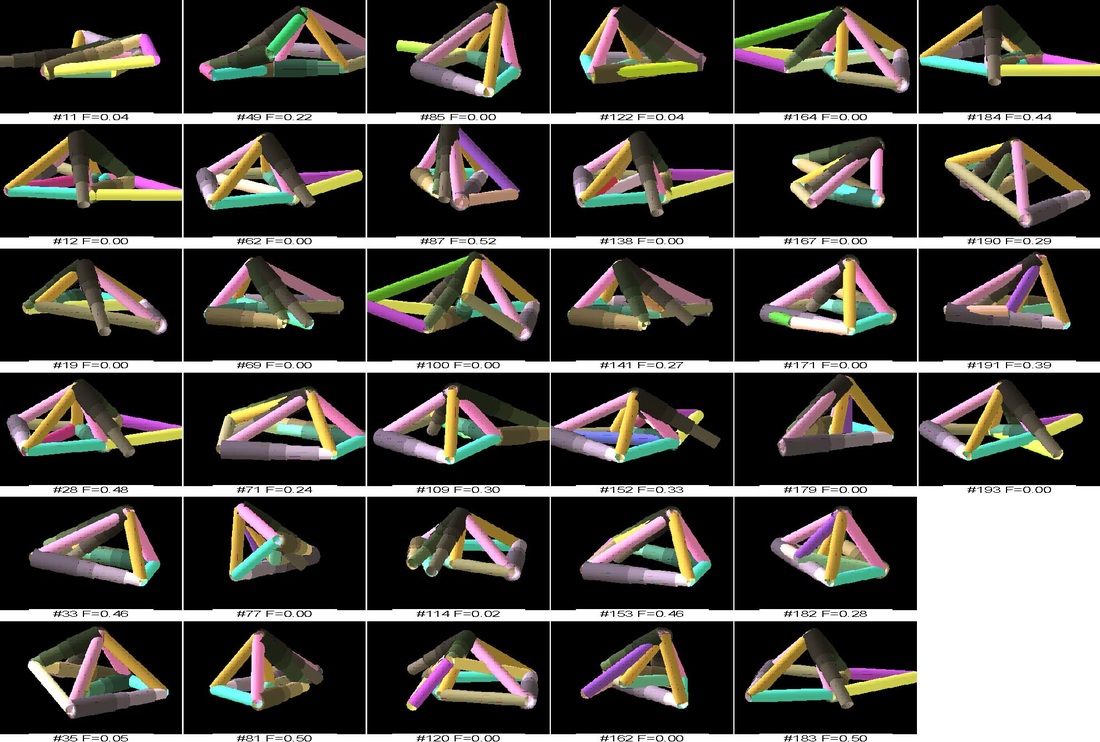

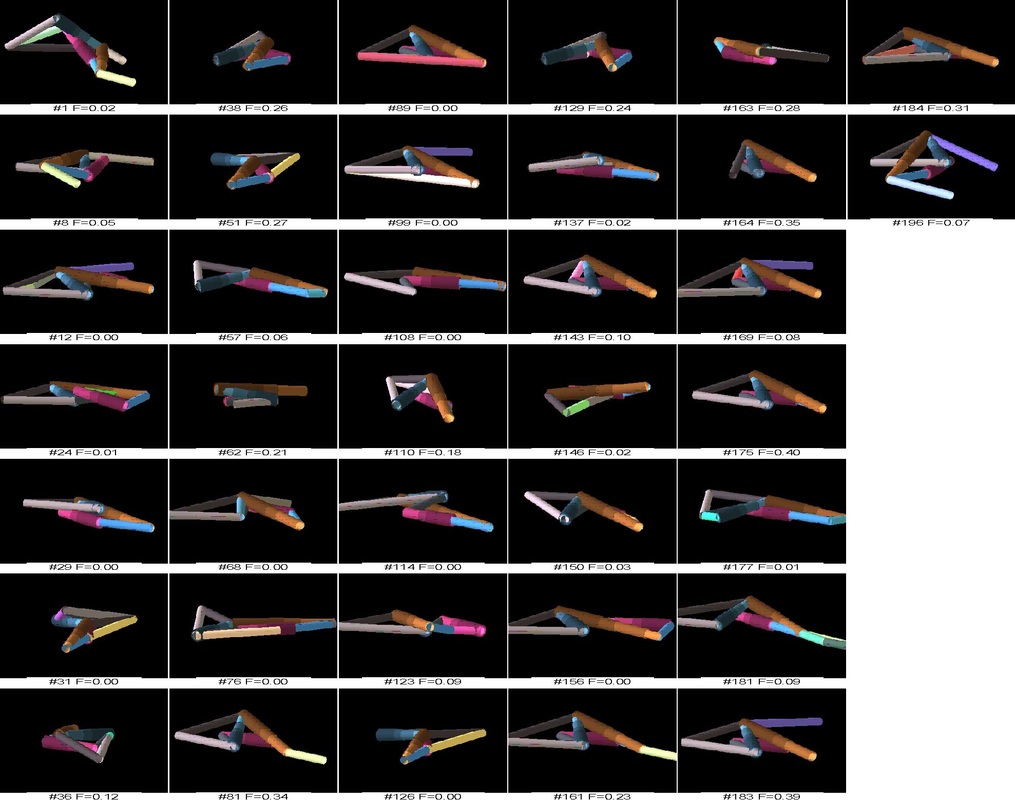
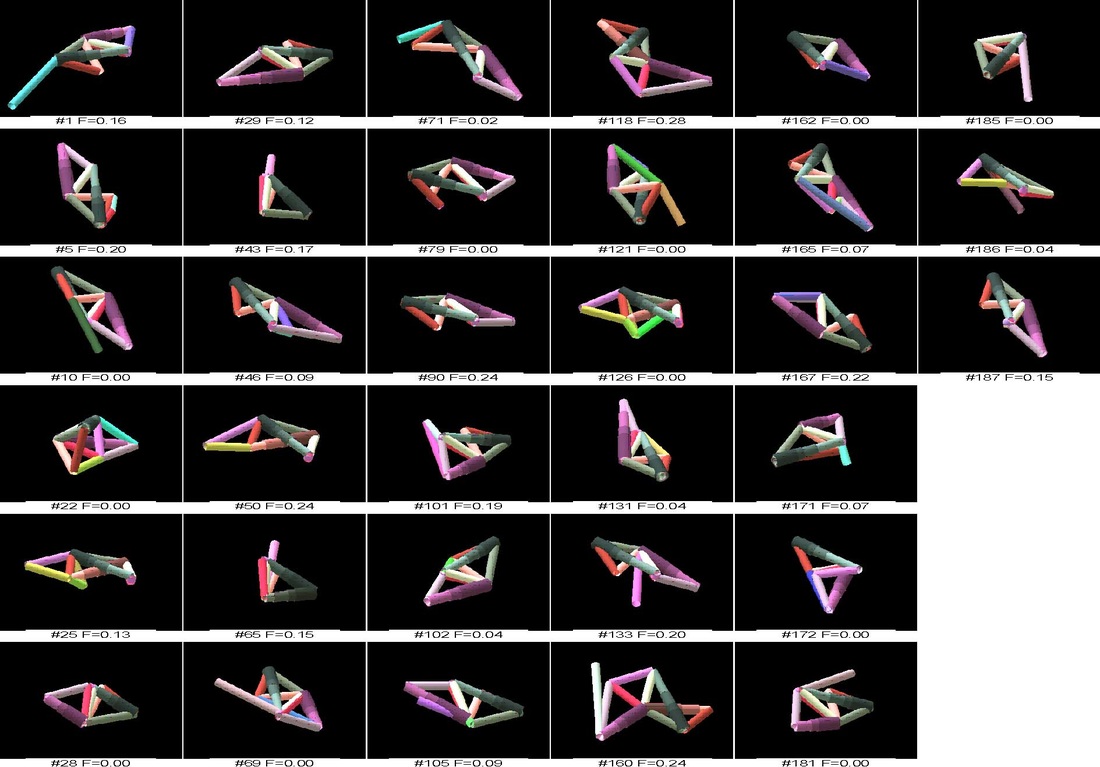








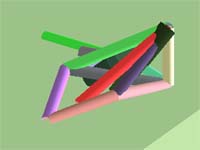

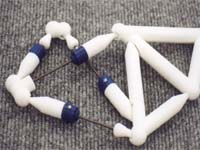
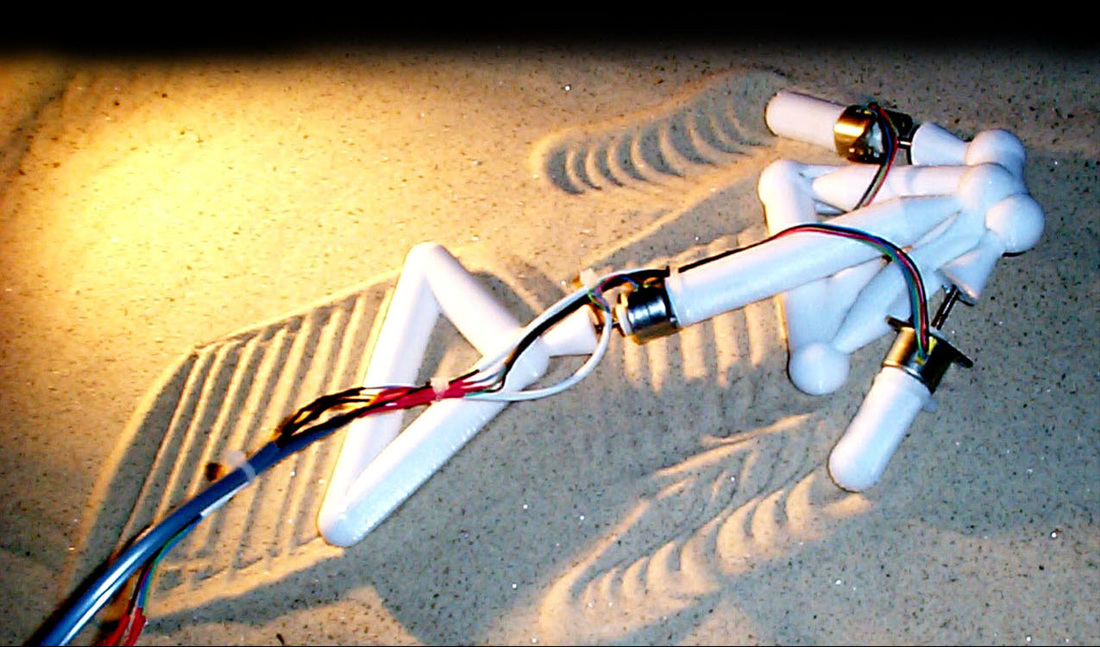
In spite of the relatively simple task and environment (locomotion over an infinite horizontal plane), surprisingly different and elaborate solutions were evolved. Machines typically contained around 20 building blocks, sometimes with significant redundancy (perhaps to make mutation less likely to be catastrophic ). Not less surprising was the fact that some exhibited symmetry, which was neither specified nor rewarded for anywhere in the code; a possible explanation is that symmetric machines are more likely to move in a straight line, consequently covering a greater net distance and acquiring more fitness. Similarly, successful designs appear to be robust in the sense that changes to bar lengths would not significantly hamper their mobility.
Project participants |
Hod Lipson, Jordan Pollack
|
learn more |
The Golem Project original website
|
Related Publications |
|
