|
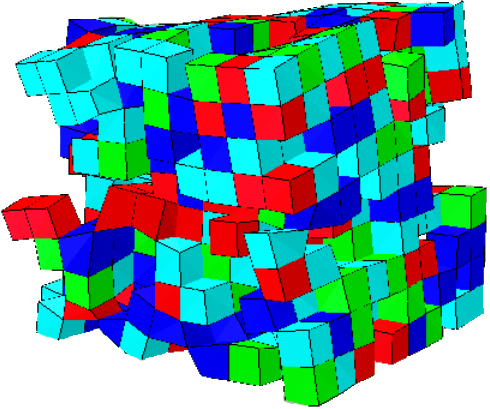
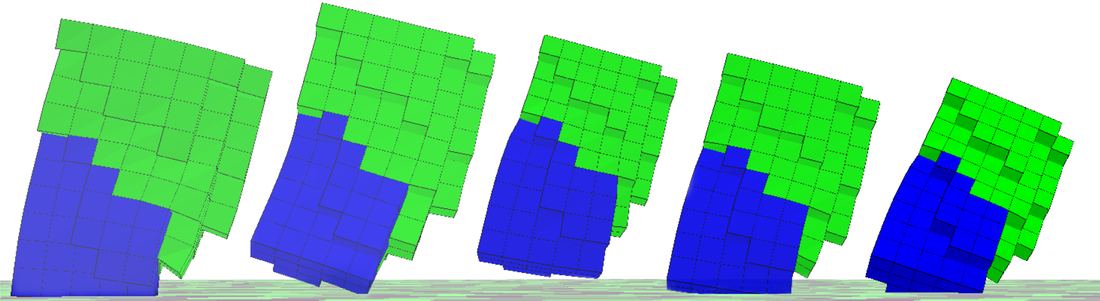
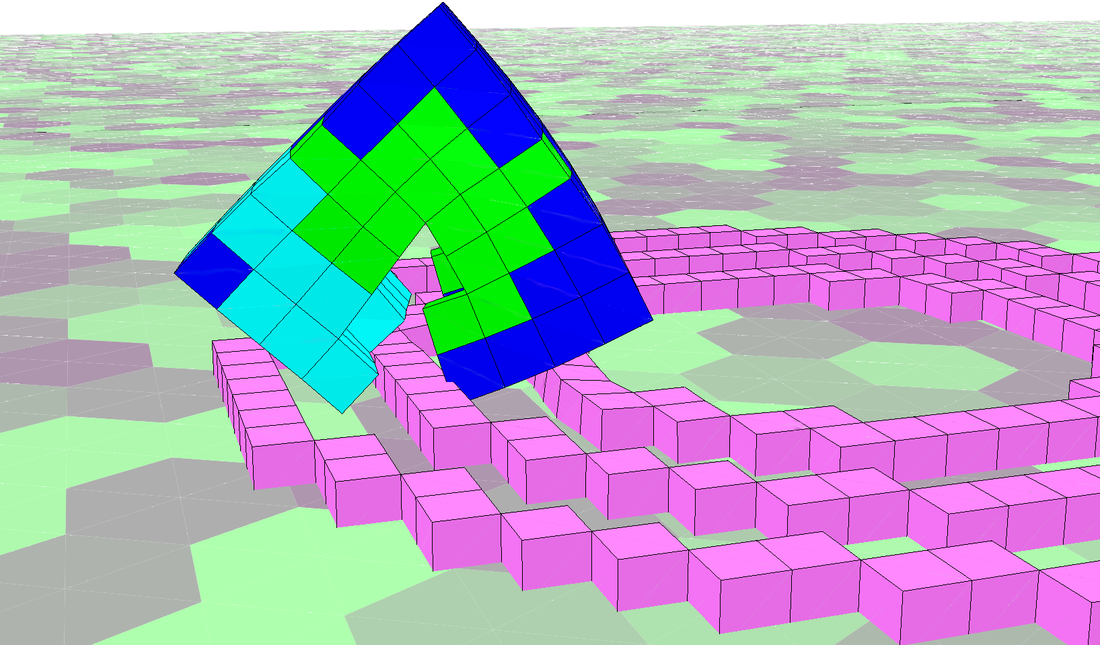
In 1994 Karl Sims showed that computational evolution can produce interesting morphologies that resemble natural organisms. Despite nearly two decades of work since, evolved morphologies are not obviously more complex or natural, and the field seems to have hit a complexity ceiling. One hypothesis for the lack of increased complexity is that most work, including Sims', evolves morphologies composed of rigid elements, such as solid cubes and cylinders, limiting the design space. A second hypothesis is that the encodings of previous work have been overly regular, not allowing complex regularities with variation. Here we test both hypotheses by evolving soft robots with multiple materials and a powerful generative encoding called a compositional pattern-producing network (CPPN). Robots are selected for locomotion speed. We find that CPPNs evolve faster robots than a direct encoding and that the CPPN morphologies appear more natural.
|
|
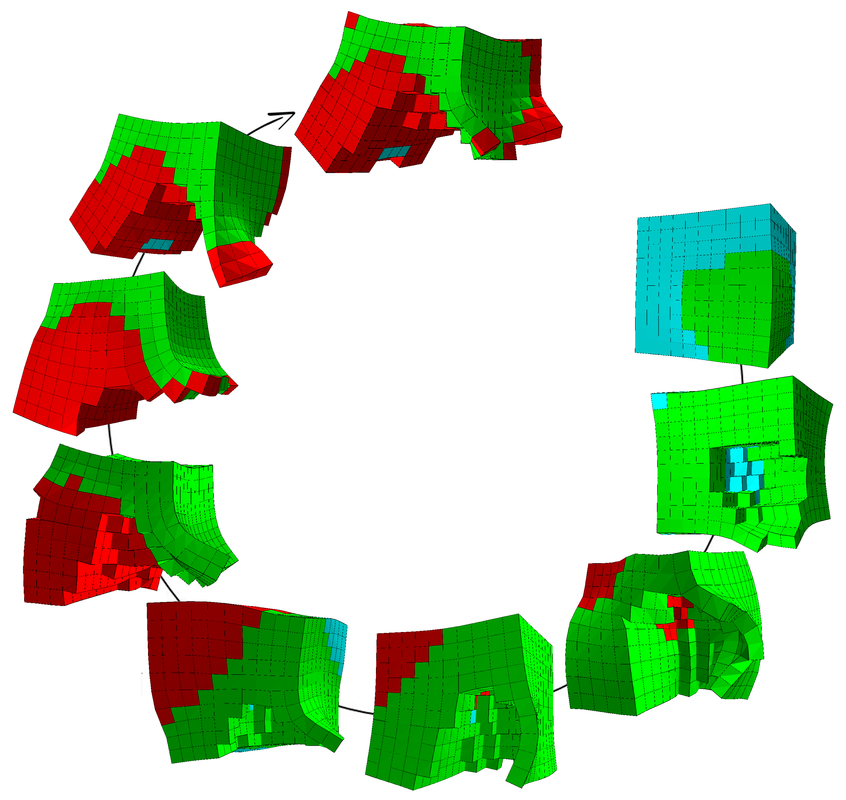
We also find that locomotion performance increases as more materials are added, that diversity of form and behavior can be increased with different cost functions without stifling performance, and that organisms can be evolved at different levels of resolution. These findings suggest the ability of generative soft-voxel systems to scale towards evolving a large diversity of complex, natural, multi-material creatures. Our results suggest that future work that combines the evolution of CPPN-encoded soft, multi-material robots with modern diversity-encouraging techniques could finally enable the creation of creatures far more complex and interesting than those produced by Sims nearly twenty years ago.
The embodied cognition paradigm emphasizes that both bodies and brains combine to produce complex behaviors, in contrast to the traditional view that the only seat of intelligence is the brain. Despite recent excitement about embodied cognition, brains and bodies remain thought of, and implemented as, two separate entities that merely interface with one another to carry out their respective roles. Previous research co-evolving bodies and brains has simulated the physics of bodies that collect sensory information and pass that information on to disembodied neural networks, which then processes that information and return motor commands. Biological animals, in contrast, produce behavior through physically embedded control structures and a complex and continuous interplay between neural and mechanical forces. In addition to the electrical pulses flowing through the physical wiring of the nervous system, the heart elegantly combines control with actuation, as the physical properties of the tissue itself (or defects therein) determine the actuation of the organ.
The embodied cognition paradigm emphasizes that both bodies and brains combine to produce complex behaviors, in contrast to the traditional view that the only seat of intelligence is the brain. Despite recent excitement about embodied cognition, brains and bodies remain thought of, and implemented as, two separate entities that merely interface with one another to carry out their respective roles. Previous research co-evolving bodies and brains has simulated the physics of bodies that collect sensory information and pass that information on to disembodied neural networks, which then processes that information and return motor commands. Biological animals, in contrast, produce behavior through physically embedded control structures and a complex and continuous interplay between neural and mechanical forces. In addition to the electrical pulses flowing through the physical wiring of the nervous system, the heart elegantly combines control with actuation, as the physical properties of the tissue itself (or defects therein) determine the actuation of the organ.
|
|
Inspired by these phenomena from cardiac electrophysiology (the study of the electrical properties of heart tissue), we introduce electrophysiological robots, whose behavior is dictated by electrical signals flowing though the tissue cells of soft robots. Here we describe these robots and how they are evolved. Videos and images of these robots reveal lifelike behaviors despite the added challenge of having physically embedded control structures. We also provide an initial experimental investigation into the impact of different implementation decisions, such as alternatives for sensing, actuation, and locations of central pattern generators. Overall, this paper provides a first step towards removing the chasm between bodies and brains to encourage further research into physically realistic embodied cognition.
|
Frequently Asked Questions:
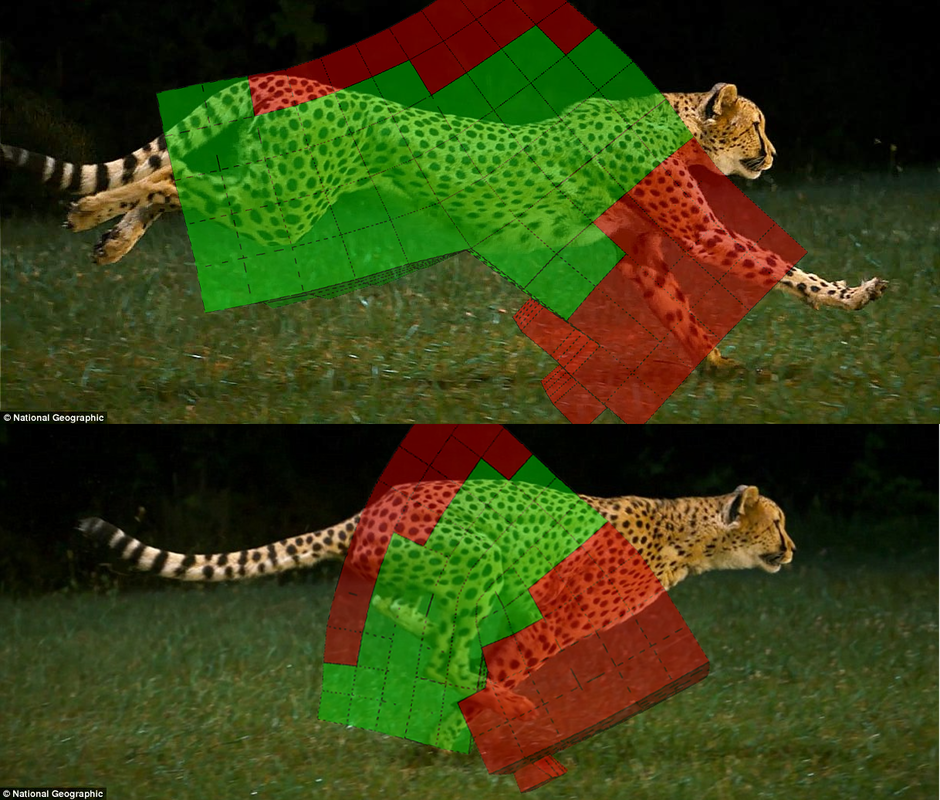
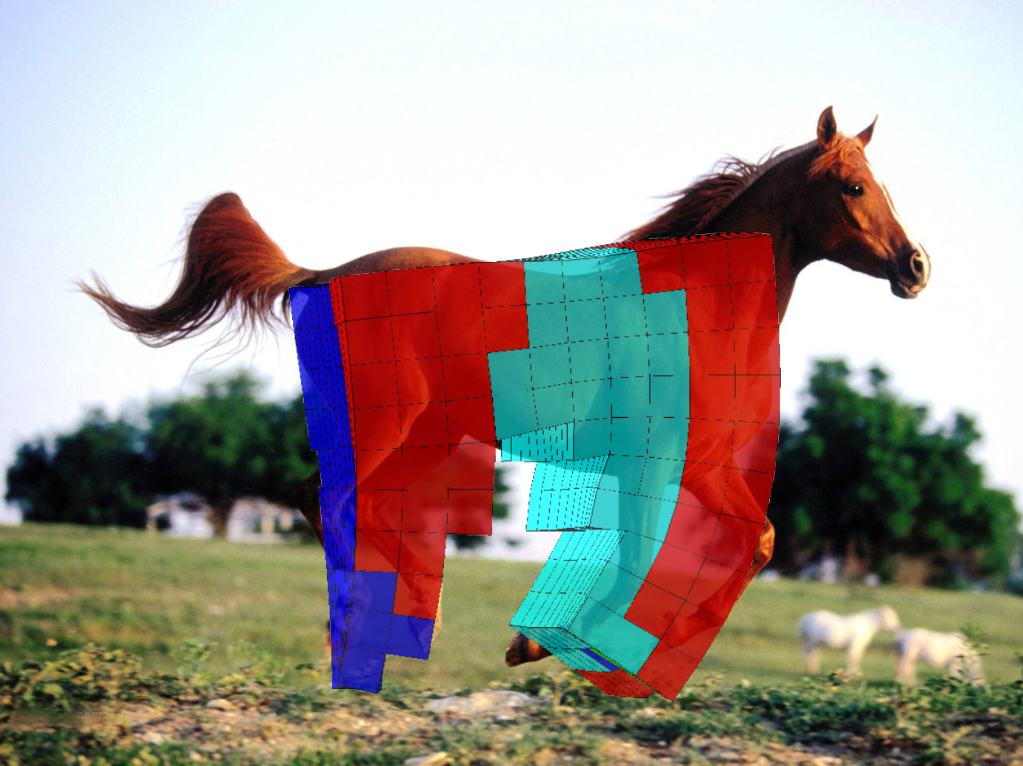
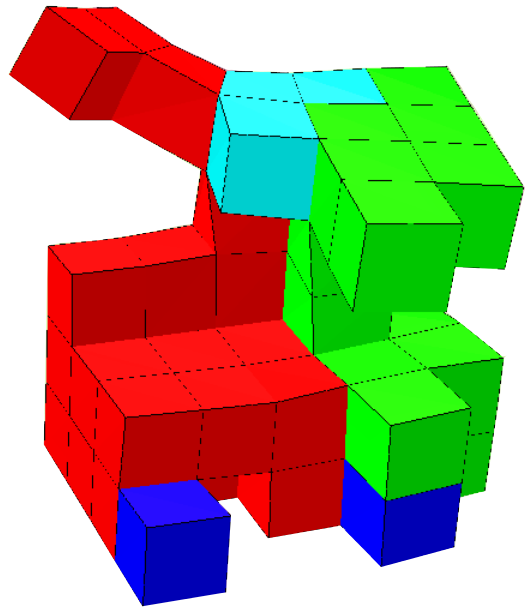
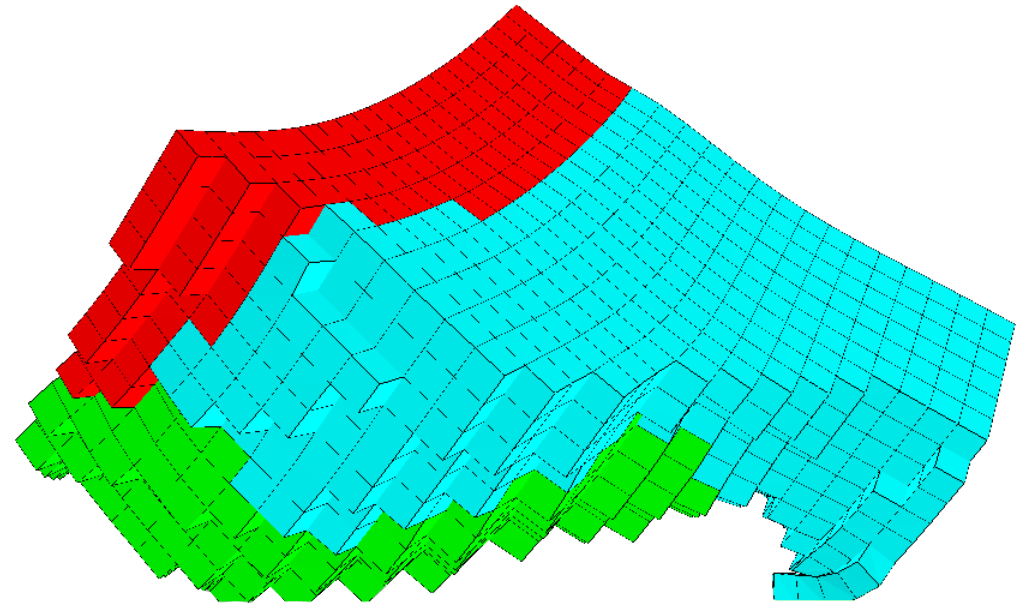
How do your theoretical assumptions differ from the ones made by K.Sims at 1994? What did you improve? Sims' work was -- and is -- still a fantastic piece of work, and an inspiration to the field. There are two major differences between his work and ours. Firstly, we use an encoding which is more directly inspired by developmental biology. The encoding is essentially the blueprint of the design, analogous to DNA in biology - and is the foundation upon which evolution does it's work. Since Sims' work, an encoding which is composed of many overlapping "chemical" gradients (called CPPN-NEAT) was developed. This is analogous to the way in which cell differentiation occurs in the early stages of developmental biology. Secondly, we introduced more "naturally inspired" materials. Sims' work, like much of the field, evolved robots by assembling a set of predefined, rigid, sub-components. Our intentions were to remove a level of abstraction and allow evolution to create it's own design from the ground up. We give it materials analogous to soft/contractible "muscles", soft/inert "tissues", and stiff "bone" -- and allow evolution to create it's own morphology and control the "cell" type at each location within such a body. Our intentions with these two thrusts is to allow the creation of more natural and life-like robots by trying to mimic nature and biology as much as possible. And while this is certainly a subjective quality -- I hope that the results (as shown in the video) speak for themselves.
Why did you choose your criterion to be locomotion speed and not anything else? This is an excellent point, and clearly an aspect in which evolutionary algorithms diverge from biology. In natural selection, the driving force is the ability of oneself to reproduce -- a survival of the "fittest". Through this pressure, and the complex interactions that take place within the rich environments on earth, we see pressures to create complex, adaptive features like arms or legs, eye or ears, and even planning or communication. In this work, we use a single measure of an individual organism as it's measure of "fitness." Then the "fittest" individuals in our population of soft robots are more likely to mate, reproduce, and create the offspring that make up the next generation of robots. This allows us to abstract away from the rich ecosystems, which we would absolutely love to simulate - but at this point are largely computationally intractable. It also allows us to define the measure of what our robots are to evolve towards. This allows us to use evolutionary algorithms as an engineering tool to optimize towards specific goals. In this case we chose locomotion as that goal because -- in addition to being a commonly accepted goal in the field and a simple task that can lead to the evolution of complex behaviors and morphologies -- it creates creatures whose abilities and behavior are visually interesting, and easily deciphered -- creating cool visualizations like the video you've seen, which can provide a proof-of-concept of these behaviors to scientists and curious onlookers alike.
What questions does this work help to answer? We strive to understand the core mechanisms of evolutionary algorithms -- and the other aspects of biology that affect evolution, such as environmental pressures, social interactions, genetic encoding, ecosystem niches, etc. -- to be optimally situated to create complex robotic brains and bodies as our increasing computational technologies allow us to further scale these algorithms. At the same time, we seek a symbiotic relationship with our partners in biology, genetics, development, psychology, cognitive science, etc. to help inform each other, and to create and answer questions across disciplines. Their knowledge of these natural systems, and our ability to simulate evolutionary trends with specific experimental conditions in hours or days instead of millions of years, give this relationship unbelievable potential.
What is the value of your research? Is there potential commercial value? There is a tremendous potential for the commercial and engineering applications of evolutionary robotics. Today we see the majority of robots performing tasks in extremely controlled and repetitive environments like assembly lines on factory floors. We see robotics trying to break free of these roles and perform even simple autonomous tasks in unpredictable environments -- like the Roomba home cleaning robot -- but so far there has been relatively little success on this front. Designing these types of robots is a very difficult task, and one that we have yet to master as engineers. However, evolution has created a multitude of animals that thrive in these unpredictable environments. Our hope, as a field, is to capture the essential aspects of evolution in our algorithms and to be able to create artificial organisms that exhibit these robust and adaptive behaviors. At first this will be the form of simple animal-like behavior -- like you see in the embodied cognition of our evolved soft robots in the context of locomotion, then eventually we will be able to scale to higher level cognitive functions like we see at the human level, and in fact even beyond that -- as by abstracting the mechanism of evolution rather than it's products (modeling the animal behaviors themselves), we are able to create novel organisms and behaviors that have yet to be discovered by our own single instance of biological evolution. While some of these goals are years away, it's small steps like this study that make us believe we are on the right path.
What further research in this field are you going to participate in?
I very much look forward to continuing this work, and others, in the future. As far as this project goes: With recent advances in 3D printing (something else our lab is also proud to be at the forefront of), the ability to create these novel creatures and fabricate them is now a very real possibility - and something you can expect to see from us soon. Previous work I've done has involved artificial neural network controllers in these evolved robots, and while this demonstration of "embodied cognition" shows the rise of complex behaviors with no high-level control, our future work including the addition of a "brain" to these robots only expands their potential for more complex tasks. Also in the pipeline are projects which would expand upon this work to create more complex environments and ecosystems in which evolution can take place -- again addressing the simplicity of this initial proof-of-concept.
|
Can you describe what you managed to find out in a few sentences? Our work demonstrates that introducing soft materials that abstract biological muscles, tissues, and bone -- in addition to using a genetic encoding that borrows from developmental biology -- can allow artificial evolution to create creatures that exhibit what we believe are unprecedentedly natural and life-like appearances and behaviors. This work is an important stepping-stone in the evolutionary design of complex and natural robots, and the associated viral video has been noted by some as "The Simplest Demonstration of Evolution You'll Ever See".
|
|











learn more |
http://www.ncheney.com/
|
Project participants |
Nick Cheney, Jonathan Hiller, Jeff Clune, Rob MacCurdy, Hod Lipson
|
Related Publications |
Unshackling evolution: evolving soft robots with multiple materials and a powerful generative encoding
N Cheney, R MacCurdy, J Clune, H Lipson - Proceedings of the 15th annual conference on Genetic …, 2013-18814. Evolved electrophysiological soft robots N Cheney, J Clune, H Lipson ALIFE 14, 222-229 Evolving Soft Robots in Tight Spaces N Cheney, J Bongard, H Lipson Proceedings of the 2015 Annual Conference on Genetic and Evolutionary Topological evolution for embodied cellular automata N Cheney, H Lipson Theoretical Computer Science 633, 19-27 ... |
