|
Biological organisms can metabolize: break down nutrients into basic building blocks and then use those building blocks to create new things. What if we could reproduce this kind of process in a robotic system?
This would allow many useful properties for engineering and manufacturing:
|
|
Ultimately, we hope that such work can provide insights into the art and science of design, the process of creativity, and biological metabolism. We also aim for wide-ranging practical applications, in areas as diverse as disaster recovery, design engineering, and space exploration.
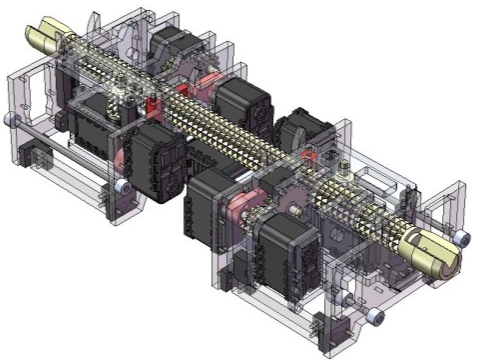
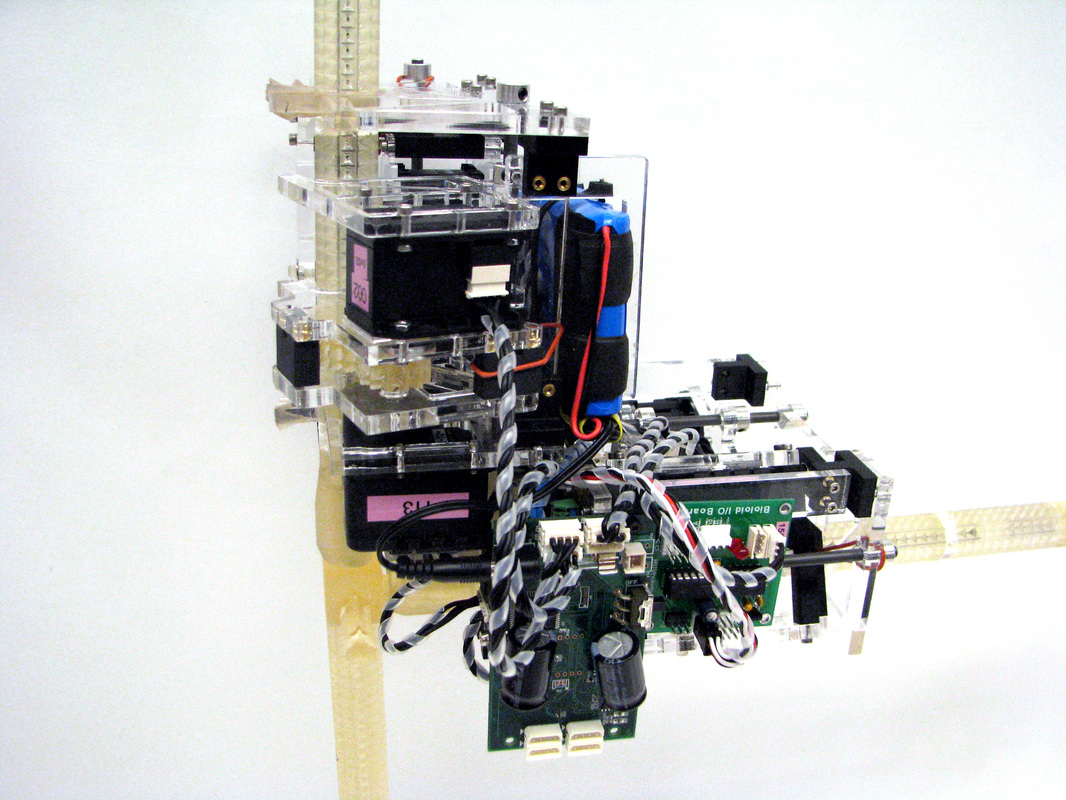
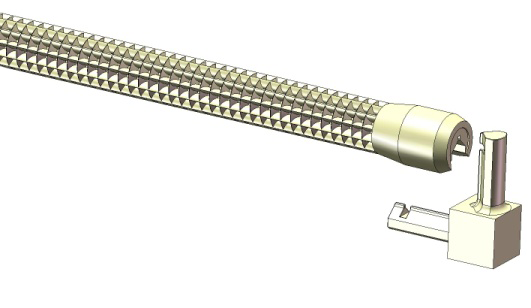
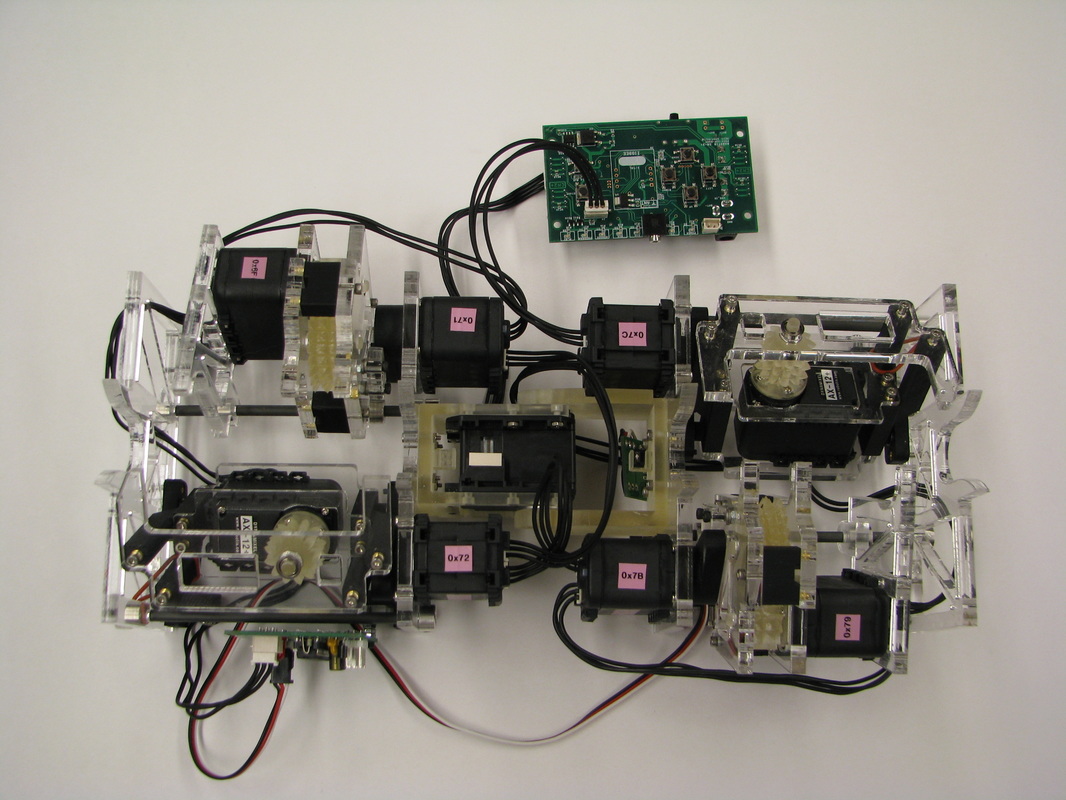
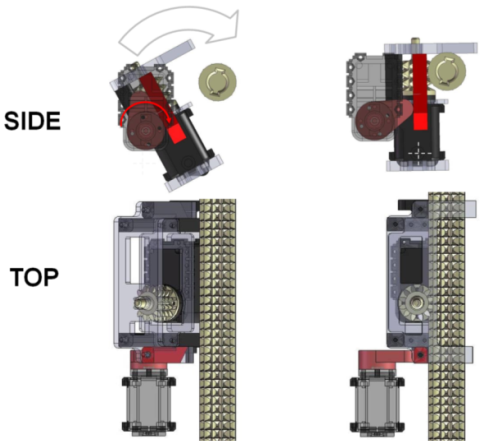
We are currently exploring these ideas in several areas. First, we have designed and constructed a robot testbed capable of reconfiguring simple truss structures, as shown in the concept image on the left and in the video below. Second, we are working on devising genetic algorithms that are capable of performing reconfigurations of these such structures to fulfill given functional requirements. Finally, we hope to expand this work into larger fields of exploration: kinematic structures, automated design, and more.
We are currently exploring these ideas in several areas. First, we have designed and constructed a robot testbed capable of reconfiguring simple truss structures, as shown in the concept image on the left and in the video below. Second, we are working on devising genetic algorithms that are capable of performing reconfigurations of these such structures to fulfill given functional requirements. Finally, we hope to expand this work into larger fields of exploration: kinematic structures, automated design, and more.


learn more |
See pub,lications below
|
Project participants |
Jeremy Blum, Franz Nigl, Shuguang Li, David Alan Hjelle, Daniel Lobo, Eric Schweikardt
|
Related Publications |
|
