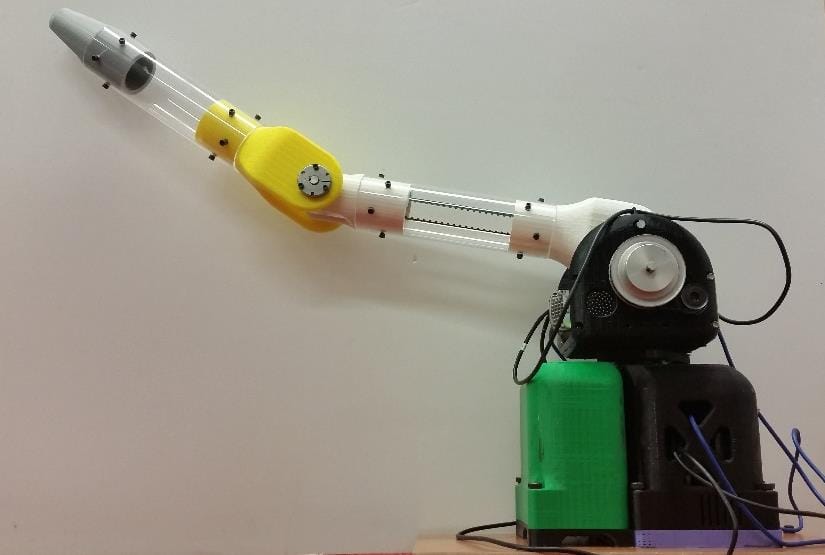
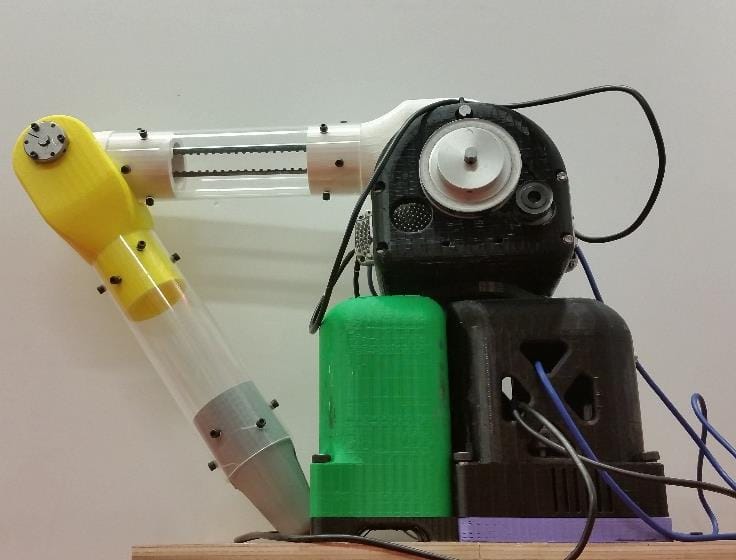
beta 0.9PARA is an open-source 3-DOF articulated arm. The main body has three motors, allowing it to reach a large workspace of about 1m diamater, with 8mm repeatability.
We designed this robot to serve as a low-cost open-source alternative to commerical industrial robots. Depite its low cost, however, its performance allows for many educational and research applications. |
|
Nominal specifications
Maximum payload: 0.6Kg
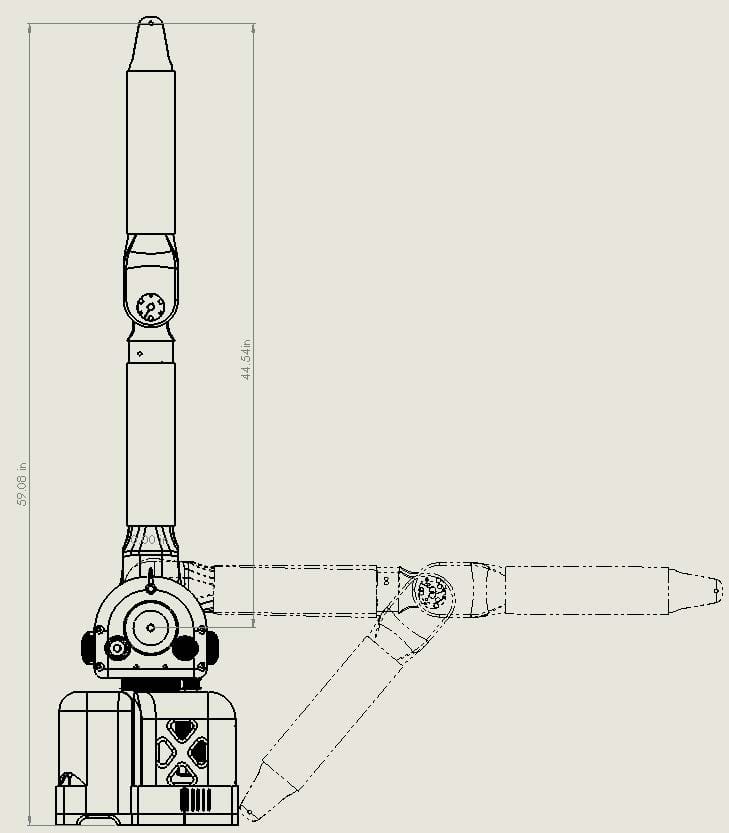
Maximum reach: 1m
Repeatability: 10mm
Maximum reach: 1m
Repeatability: 10mm
Cost
Unlike conventional articulated robots that cost over $20,000, Para can be built for under $2,000. The majority of the cost is in the motors that drive the base and the arms. While we selected a high-precision high-torque servo motor with position feedback at 0.05 Degree resolution, cheaper stepper motors can be substituted at the expense of power, precision and repeatability.



Bill of materials
1 x Hard Maple Butcher Block ($49.50)
6 x Adhesive Rubber Foot Pads ($1.91)
6 x Allow Steel Shoulder Screws (3/8"-16 Thread) ($23.28)
12 x Steel Hex nuts (3/8"-16 Thread) ($2.62)* (Comes in pack of 50 for $10.92)
6 x Black-Oxide Alloy Steel Socket Head Screw (3/8"-16 Thread size, 1-1/4" Long) ($2.23)* (Comes in pack of 25 for $9.27)
6 x Stainless Steel Washers ($0.25)* (Comes in pack of 100 for $5.01)
1 x Smoothieboard 5x ($167.97)
1 x USB 2.0 Cable - A-Male to B-Male (smoothieboard to computer) ($4.99)
2 x ClearPath Integrated Servo Systems (CPM-SDSK-3441S-ELN) ($984)
1 x ClearPath Integrated Servo System (CPM-SDSK-2341S-ELN) ($416)
3 x Controller Cables (CPM-CABLE-CTRL-MU120) ($69)
12 x Stainless Steel Flanged Hex Head Screws with Slotted Drive (10-32 Thread, 1 1/2" long) ($0.66)* (Comes in pack of 100 for $5.50)
12 x Stainless Steel Narrow Hex Nuts (10-32 Thread) ($0.66)* (Comes in pack of 100 for $5.50)
1 x 350/500 Watt DC Power Supply (IPC-5) ($248)
1 x AC Power Cable (for IPC-5) ($14)
1 x DC Power Cable, IPC to ClearPath ($19)
3 x Mini Fit Housing 4POS ($1.02)
1 x DC Equipment Cooling Fan (4.69" Square by 1" depth) ($37.75)
1 x DC Equipment Cooling Fan (3.15" Square by 1" depth) ($28.88)
8 x Stainless Steel Socket Head Screws (8-32 Thread, 1-3/4" Long) ($2.12)* (Comes in pack of 25 for $6.63)
8x Steel Hex Nuts (8-32 Thread Size) ($0.13)* (Comes in pack of 100 for $1.60)
2 x Acrylic Tubes ($85.22)
24 x Screw-to-Expand Inserts ($10.66)* (Comes in pack of 25 for $11.10)
24 x Black-Oxide Alloy Steel Socket Head Screws ($8.35)* (Comes in pack of 25 for $8.70)
1 x Black-Oxide Alloy Steel Socket Head Screw (1/4"-20 Thread Size, 1-1/8" Long) ($18.41)
1 x Extra-Wide Thin Hex Nut ($3.22)
2 x Oil-Embedded Thrust Bearings ($3.00)
1 x Thrust Needle-Roller Bearing (5/8" Shaft Diameter) ($3.11)
2 x Thick Washer for 5/8" Shaft Diameter Thrust Needle-Roller Bearing ($2.20)
1 x Thrust Needle-Roller Bearing (1-1/8" Shaft Diameter) ($3.17)
2 x Thick Washer for 1-1/8" Shaft Diameter Thrust Needle-Roller Bearing ($3.14)
1 x Thrust Needle-Roller Bearing (1-3/4" Shaft Diameter) ($4.55)
2 x Thick Washer for 1-3/4" Shaft Diameter Thrust Needle-Roller Bearing ($4.22)
3 x Keyed Rotary Shafts (6" long) ($38.19)
1 x Keyed Rotary Shaft (9" long) ($17.42)
1 x L Series Timing Belt (42" Outer Circle) ($16.90)
1 x L Series Timing Belt (15.8" Outer Circle) ($8.56)
4 x L Series Timing Belts (14.25" Outer Circle) ($46.36)
3 x L Series Timing Belt Pulleys (32 Teeth) ($199.20)
6 x L Series Timing Belt Pulleys (10 Teeth) ($86.28)
10 x Radial Ball Bearings (for 1/2" Shaft Diameter) ($60.40)
3 x Radial Ball Bearings (for 5/8" Shaft Diameter) ($19.29)
2 x Quick-Disconnect Bushings (JA Style, 1/2" Bore Size) ($24.48)
6 x Heat-Set Inserts for Plastics ($1.47)* (Comes in pack of 50 for $12.21)
1 x Black-Oxide Alloy Steel Socket Head Screw (1/4"-20 Thread Size, 2" Long) ($0.31)
2 x Press-Fit Drill Bushings ($14.88)
20 lbs of 3D printer filament (ABS or PLA) (~$230)
Recomended tools and Items for assembly:
This section is under construction
6 x Adhesive Rubber Foot Pads ($1.91)
6 x Allow Steel Shoulder Screws (3/8"-16 Thread) ($23.28)
12 x Steel Hex nuts (3/8"-16 Thread) ($2.62)* (Comes in pack of 50 for $10.92)
6 x Black-Oxide Alloy Steel Socket Head Screw (3/8"-16 Thread size, 1-1/4" Long) ($2.23)* (Comes in pack of 25 for $9.27)
6 x Stainless Steel Washers ($0.25)* (Comes in pack of 100 for $5.01)
1 x Smoothieboard 5x ($167.97)
1 x USB 2.0 Cable - A-Male to B-Male (smoothieboard to computer) ($4.99)
2 x ClearPath Integrated Servo Systems (CPM-SDSK-3441S-ELN) ($984)
1 x ClearPath Integrated Servo System (CPM-SDSK-2341S-ELN) ($416)
3 x Controller Cables (CPM-CABLE-CTRL-MU120) ($69)
12 x Stainless Steel Flanged Hex Head Screws with Slotted Drive (10-32 Thread, 1 1/2" long) ($0.66)* (Comes in pack of 100 for $5.50)
12 x Stainless Steel Narrow Hex Nuts (10-32 Thread) ($0.66)* (Comes in pack of 100 for $5.50)
1 x 350/500 Watt DC Power Supply (IPC-5) ($248)
1 x AC Power Cable (for IPC-5) ($14)
1 x DC Power Cable, IPC to ClearPath ($19)
3 x Mini Fit Housing 4POS ($1.02)
1 x DC Equipment Cooling Fan (4.69" Square by 1" depth) ($37.75)
1 x DC Equipment Cooling Fan (3.15" Square by 1" depth) ($28.88)
8 x Stainless Steel Socket Head Screws (8-32 Thread, 1-3/4" Long) ($2.12)* (Comes in pack of 25 for $6.63)
8x Steel Hex Nuts (8-32 Thread Size) ($0.13)* (Comes in pack of 100 for $1.60)
2 x Acrylic Tubes ($85.22)
24 x Screw-to-Expand Inserts ($10.66)* (Comes in pack of 25 for $11.10)
24 x Black-Oxide Alloy Steel Socket Head Screws ($8.35)* (Comes in pack of 25 for $8.70)
1 x Black-Oxide Alloy Steel Socket Head Screw (1/4"-20 Thread Size, 1-1/8" Long) ($18.41)
1 x Extra-Wide Thin Hex Nut ($3.22)
2 x Oil-Embedded Thrust Bearings ($3.00)
1 x Thrust Needle-Roller Bearing (5/8" Shaft Diameter) ($3.11)
2 x Thick Washer for 5/8" Shaft Diameter Thrust Needle-Roller Bearing ($2.20)
1 x Thrust Needle-Roller Bearing (1-1/8" Shaft Diameter) ($3.17)
2 x Thick Washer for 1-1/8" Shaft Diameter Thrust Needle-Roller Bearing ($3.14)
1 x Thrust Needle-Roller Bearing (1-3/4" Shaft Diameter) ($4.55)
2 x Thick Washer for 1-3/4" Shaft Diameter Thrust Needle-Roller Bearing ($4.22)
3 x Keyed Rotary Shafts (6" long) ($38.19)
1 x Keyed Rotary Shaft (9" long) ($17.42)
1 x L Series Timing Belt (42" Outer Circle) ($16.90)
1 x L Series Timing Belt (15.8" Outer Circle) ($8.56)
4 x L Series Timing Belts (14.25" Outer Circle) ($46.36)
3 x L Series Timing Belt Pulleys (32 Teeth) ($199.20)
6 x L Series Timing Belt Pulleys (10 Teeth) ($86.28)
10 x Radial Ball Bearings (for 1/2" Shaft Diameter) ($60.40)
3 x Radial Ball Bearings (for 5/8" Shaft Diameter) ($19.29)
2 x Quick-Disconnect Bushings (JA Style, 1/2" Bore Size) ($24.48)
6 x Heat-Set Inserts for Plastics ($1.47)* (Comes in pack of 50 for $12.21)
1 x Black-Oxide Alloy Steel Socket Head Screw (1/4"-20 Thread Size, 2" Long) ($0.31)
2 x Press-Fit Drill Bushings ($14.88)
20 lbs of 3D printer filament (ABS or PLA) (~$230)
Recomended tools and Items for assembly:
This section is under construction
STL files
1 x Power Supply Cover (3D Printed)
1 x Power Supply Stand (3D Printed)
1 x Base (3D Printed)
1 x Base Stand (3D Printed)
1 x Link 1 (3D Printed)
1 x Link 2 Bottom (3D Printed)
1 x Link 2 Top (3D Printed)
1 x Link 3 Bottom (3D Printed)
1 x End Effector (3D Printed)
1 x Acrylic Tube Hole Cutting Jig (3D Printed)
See suggested printing orientation and settings
1 x Power Supply Stand (3D Printed)
1 x Base (3D Printed)
1 x Base Stand (3D Printed)
1 x Link 1 (3D Printed)
1 x Link 2 Bottom (3D Printed)
1 x Link 2 Top (3D Printed)
1 x Link 3 Bottom (3D Printed)
1 x End Effector (3D Printed)
1 x Acrylic Tube Hole Cutting Jig (3D Printed)
See suggested printing orientation and settings
CAD FILES
Power Supply Cover (SOLIDWORKS)
Power Supply Stand (SOLIDWORKS)
Base (SOLIDWORKS)
Base Stand (SOLIDWORKS)
Link 1 (SOLIDWORKS)
Link 2 Bottom (SOLIDWORKS)
Link 2 Top (SOLIDWORKS)
Link 3 Bottom (SOLIDWORKS)
End Effector (SOLIDWORKS)
Acrylic Tube Hole Cutting Jig (SOLIDWORKS)
Power Supply Stand (SOLIDWORKS)
Base (SOLIDWORKS)
Base Stand (SOLIDWORKS)
Link 1 (SOLIDWORKS)
Link 2 Bottom (SOLIDWORKS)
Link 2 Top (SOLIDWORKS)
Link 3 Bottom (SOLIDWORKS)
End Effector (SOLIDWORKS)
Acrylic Tube Hole Cutting Jig (SOLIDWORKS)
Assembly Instructions
TBD
Software Instructions
TBD
learn more |
https://github.com/CreativeMachinesLab/CML1754
|
Project participants |
Michael C. Chun, Hod Lipson
|
Related Publications |
|
