|
Biological locomotion displays a high degree of fault tolerance to physical damage. However, robotic locomotion does not share the same characteristic, and is in contrast highly sensitive to mechanical damage. One reason for this difference lies in the mechanical design and control philosophy of modern robots, which is usually based on the idea of a single actuator controlling a single degree of freedom. In contrast, this paper seeks to explore a new paradigm in the design of locomotor robots based on the concept of tensegrity, which enables the development of highly redundant mechanical structures. Actuation of such a structure at one location affects multiple degrees of freedom, and can thus enable a high degree of fault tolerant control. The goal of this work was to investigate the possibility for locomotion in tensegrity based robots, and evaluate the ability for fault tolerant locomotion. The results show that tensegrity robots can provide a suitable platform for locomotion, and show a considerable degree of fault tolerance.
|
|
|
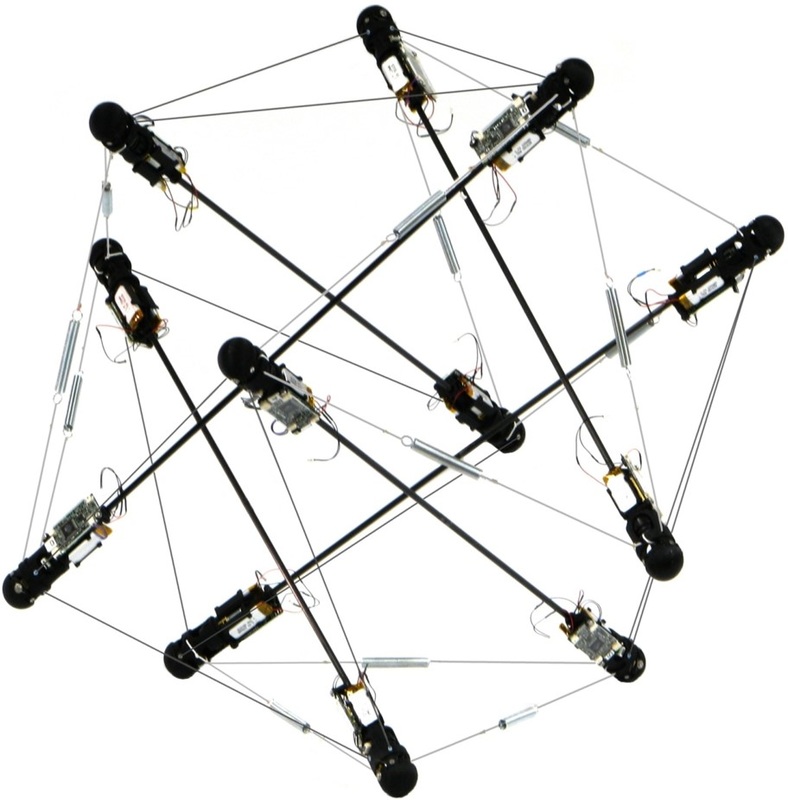
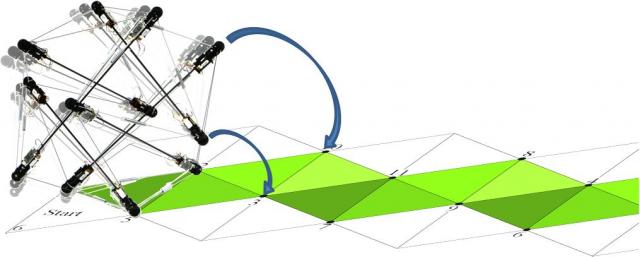
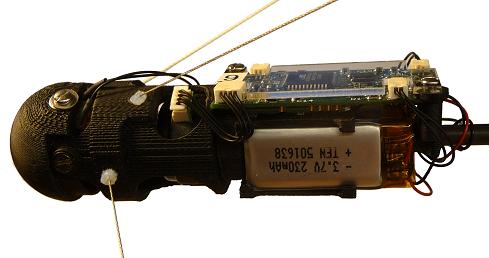
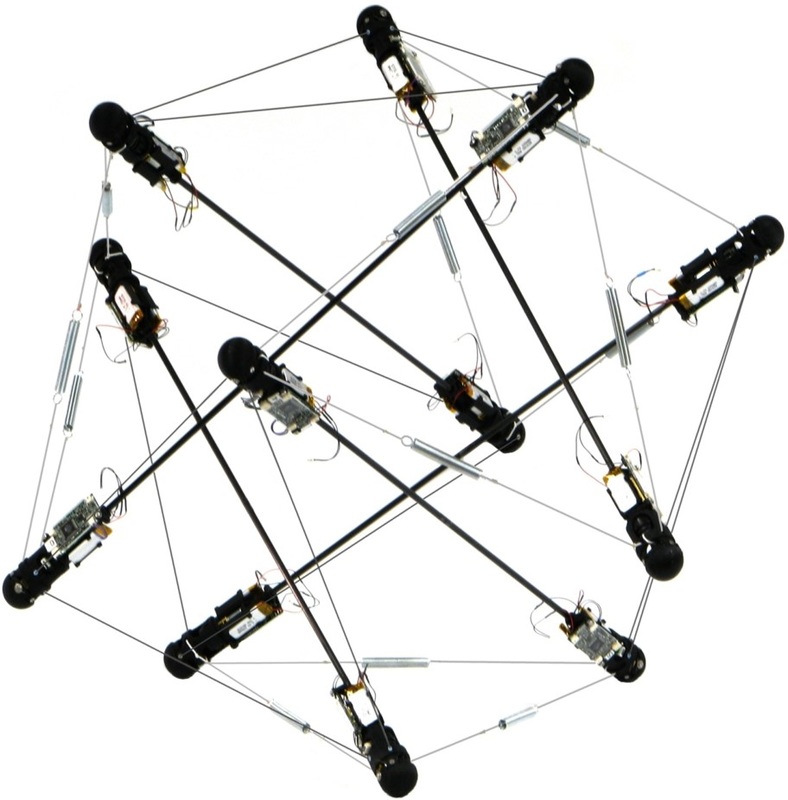
This projects demonstrates a shape-changing amorphous robot based on principles of tensegrity. Tensegrities are structures made out of struts and cables arranged such that the structure retains a 3D shape without the struts touching each other. Tensegrities have excellent strength to weight ratio and have been used frequently in architectural design. Others have used tensegrity principles to explain structural properties of biological cells, yet their potential for robotics applications remains largely unexplored. Their advantages over many other legged robots are their resilience to deformation, their ability to change shape and their high strength-to-weight ratio. The robot developed in this project, the IcoTens, comprises six rods, 24 strings and 12 actuators, and is the most complex tensegrity robot built to date. It can change its morphology and is the first of its kind to be able to roll, collapse and crouch. Rolling locomotion makes it significantly faster than all other tensegrity robots. Because of its distributed actuation, the IcoTens can tolerate the loss of multiple actuators while maintaining locomotion. Tensegrity machines such as this open the door to applications where shape changing, resilience, redundancy and reliability are key.
|
|
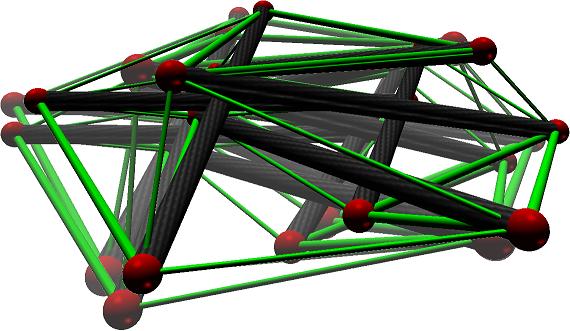
Tensegrities consist of disjoint struts connected by tensile strings which maintain shape due to pre-stress stability. Because of their rigidity, foldability and deployability, tensegrities are becoming increasingly popular in engineering. Unfortunately few effective analytical methods for discovering tensegrity geometries exist. We introduce an evolutionary algorithm which produces large tensegrity structures, and demonstrate its efficacy and scalability relative to previous methods. A generative representation allows the discovery of underlying structural patterns. These techniques have produced the largest and most complex irregular tensegrities known in the field, paving the way toward novel solutions ranging from space antennas to soft robotics.
|
|
learn more |
See papers below
|
Project participants |
Simon Fivat, John Rieffel, Chandana Paul, Francisco Valero Cuevas, Hod Lipson
|
Related Publications |
|
