|
The field of Soft Robotics promises many potential benefits such as resistance to mechanical damage, contact compliance, and better compatibility for human-robot interaction. However, realization of this potential has been hindered by the lack of a soft actuator. While flexible batteries and circuits exist, a key challenge for soft robotics remains the absence of an electrically-driven motor made entirely of soft materials, capable of delivering large strains. Here we propose a new meta-material that produces strain density that is more than 10 times better than natural muscle. We demonstrate the material in a range of robotic applications. We suggest that this new material opens the door to fully-soft robots.
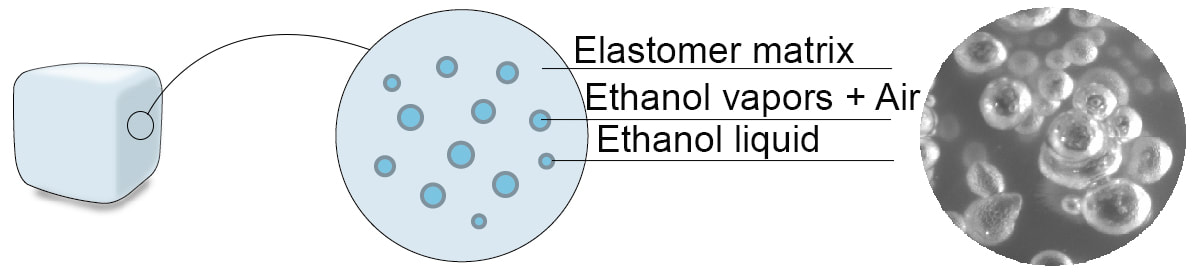
We aimed to synthesize a cheap, simple, user- and environment-friendly material comprised of, preferrably, food-safe and bio-compatible materials. We chose PDMS-based silicone elastomer, a non-hazardous elastomer widely used for soft robotic applications, as a matrix material, and ethanol, a widely used alcohol with boiling temperature 78.4 °C and matrix-compatibility, as the active fluid . |
|
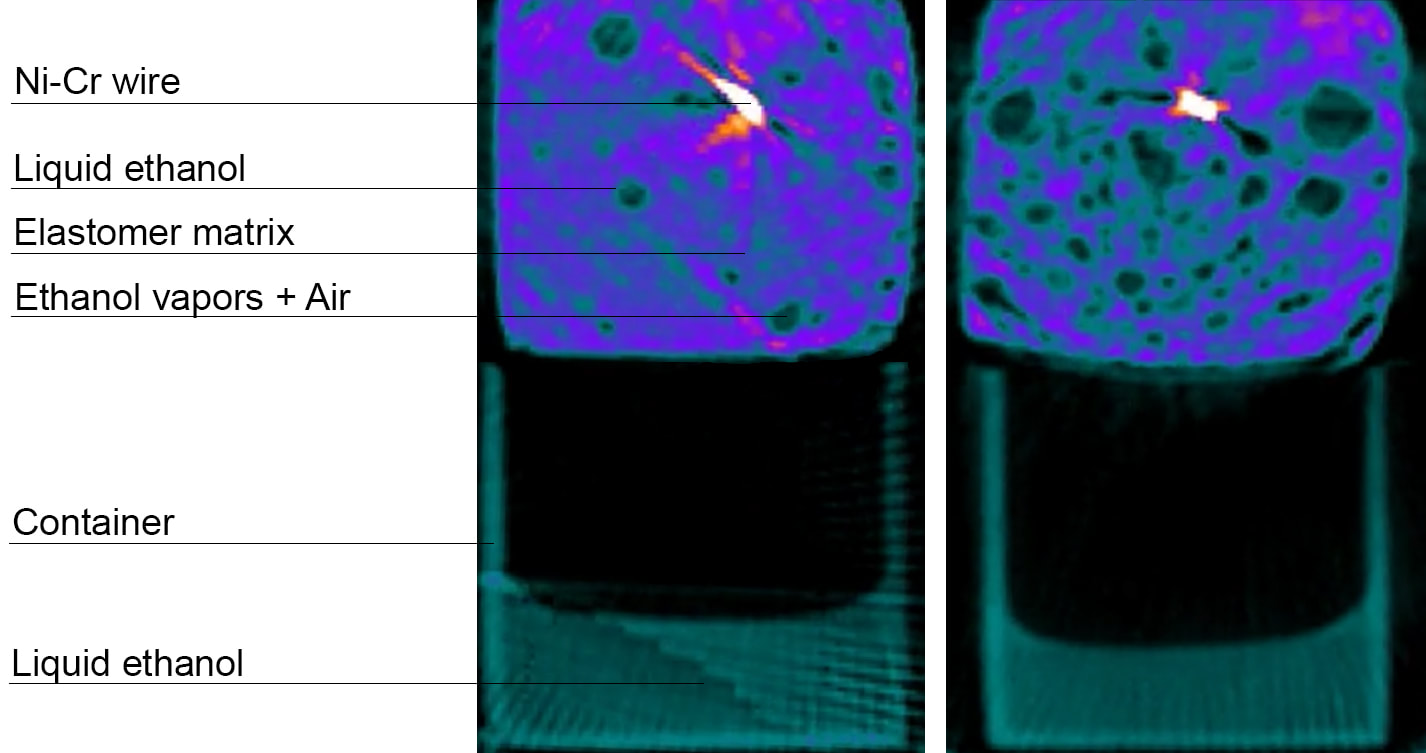
Ethanol, included inside tiny micro-bubbles embedded in the elastic silicone rubber matrix, boils upon reaching the liquid–gas transition temperature, accompanied by tremendous increase in volume, leading to significant expansion of the whole soft composite material. Liquid ethanol evaporates with temperature, giving rise to internal pressure inside the bubbles, which results in slightly expanded silicone elastomer matrix. When ethanol passes the liquid–vapor phase transition, extreme volume change occurs and the silicone elastomer matrix significantly expands. With growth in local pressure, the boiling temperature increases and thus, continued heating to temperatures slightly higher than 78.4 °C is required for further expansion, until no liquid ethanol remains in the bubbles.
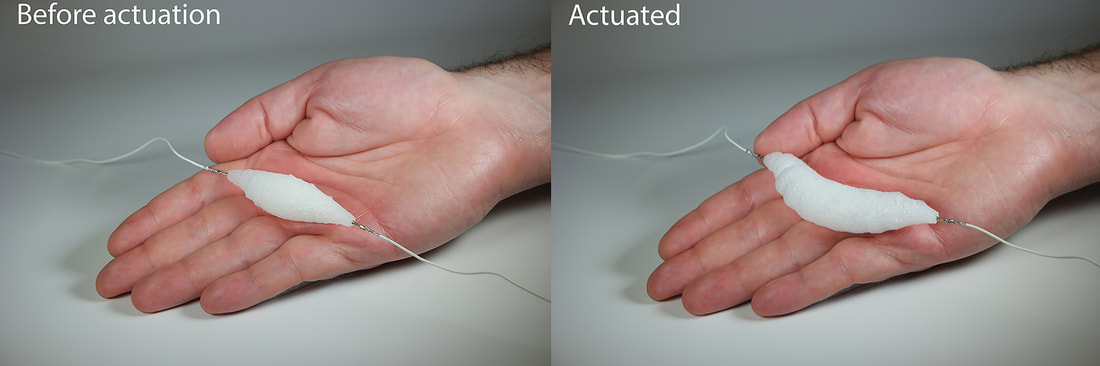
We show the material as an artificial muscle that can be electrically actuated using a thin resistive wire and low power characteristics (8 V, 1 A) to exhibit significant expansion-contraction ability.
We show the material as an artificial muscle that can be electrically actuated using a thin resistive wire and low power characteristics (8 V, 1 A) to exhibit significant expansion-contraction ability.




|
This composite material may be quickly and easily prepared by mixing ethanol with silicone elastomer. We successfully mixed various amounts of ethanol (0–33 vol%) in the two-part platinum-catalyzed silicone elastomer. In total 20 vol% ethanol was chosen as optimal composition. |
|
|
|
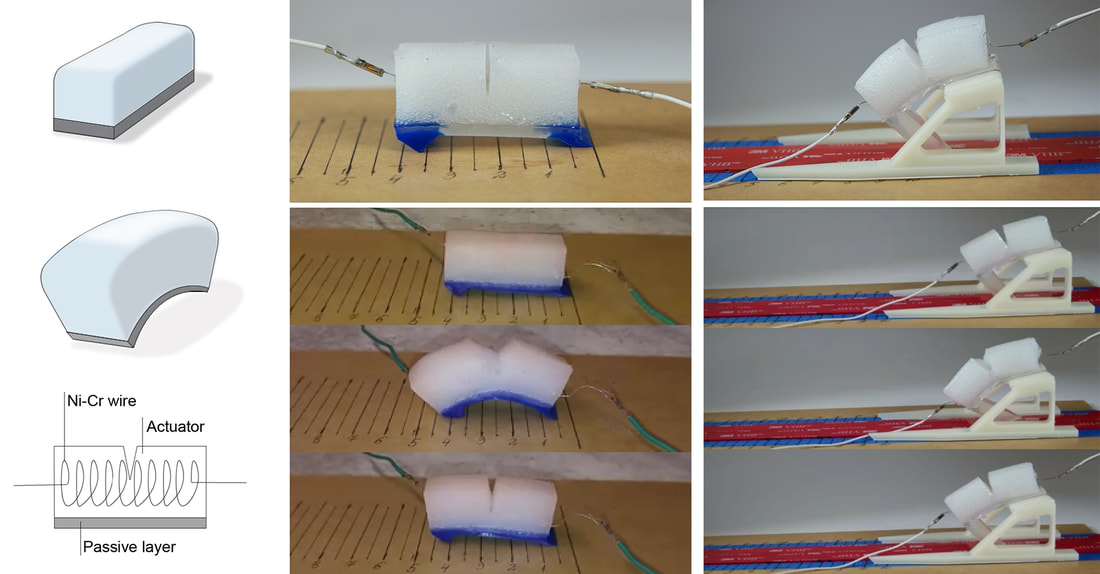
The mixed material is both castable and 3D-printable, and after preparation will solidify in room-temperature curing. Fabrication of the actuator using 3D-Printer was performed on a lab-made desktop 3D-printer capable of direct printing of two materials in one print. For optimal printing using 14 gauge syringe tip, and the material was held in the mixing container for 15 min before printing. |
|
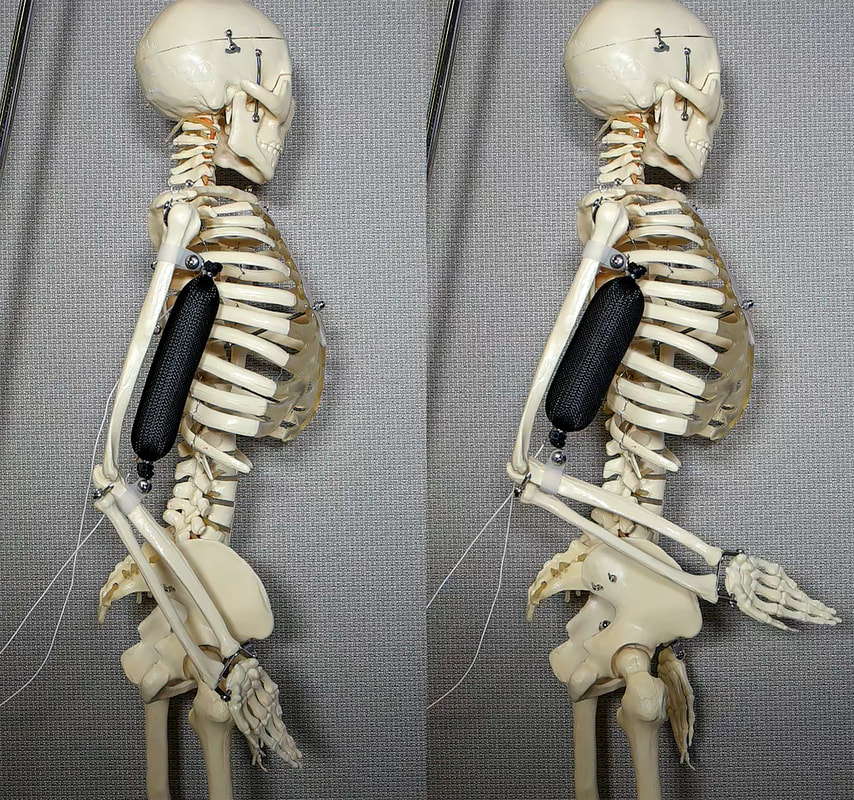
We suggested a biology inspired solution of actuation/de-actuation cycle using agonist-antagonist muscle pairs. It is well known that during the contraction of biceps to bend the arm at the elbow, triceps are relaxed, and vice versa. This feature may be used to significantly reduce the de-actuation time of the proposed actuator. Once one actuator (biceps) will complete its work to bend the arm, the task of bringing the arm back into its initial open position may be done by triggering the second actuator (triceps), instead of waiting for the cooling of the biceps. In the The movie on the right side shows that this method may increase the actuation/de-actuation time 2.4 times. |
|
Today we are working on imparting our material sensing capabilities to enable feedback for computerized control of the actuation. Simultaneously, we are developing artificial intelligence (AI) approach for prediction of the soft material behavior based on real time self-learning from its previous history. We believe that this will allow fully-automated operation of robot's actuation, with no human intervention in the loop.
Project participants |
Aslan Miriyev, Kenneth Stack, Hod Lipson
|
Related Publications |
Soft material for soft actuators
A. Miriyev, K. Stack, H. Lipson, Nature Communications, 8:596 (2017), doi:10.1038/s41467-017-00685-3. |
