|
Many insects and some birds can hover in place using flapping wing motion. Although this ability is key to making small scale aircraft, hovering flapping behavior has been difficult to reproduce artificially due to the challenging stability, power, and aeroelastic phenomena involved. A number of ornithopters have been demonstrated, some even as toys, nearly all of these designs, however, cannot hover in place because lift is maintained through airfoils that require forward motion.
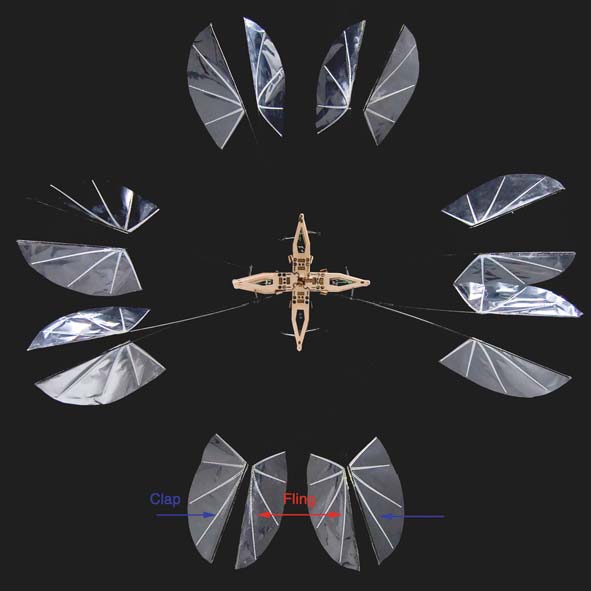
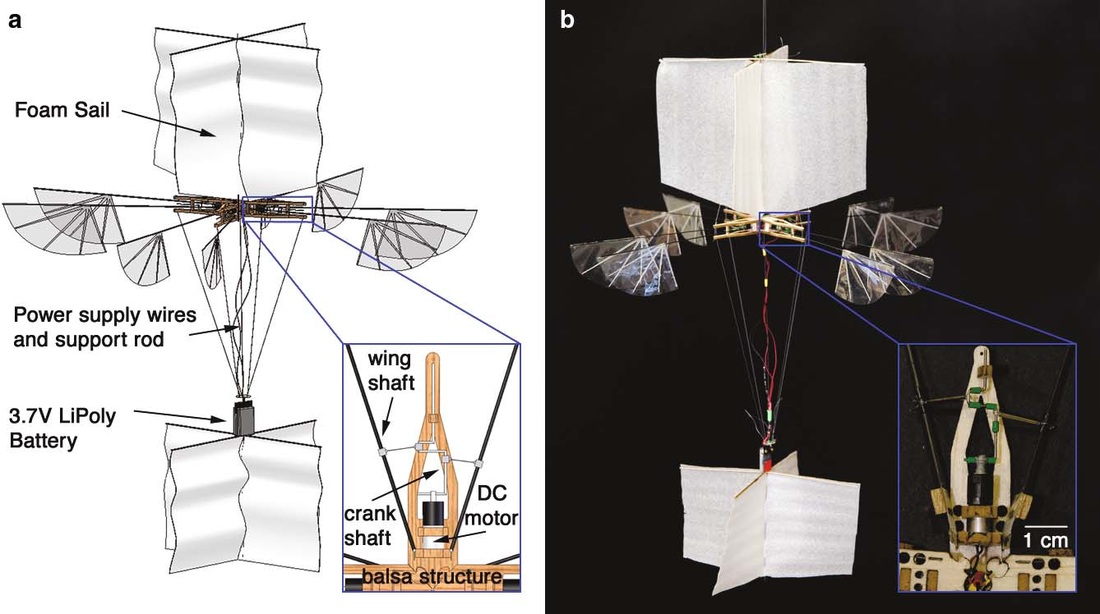
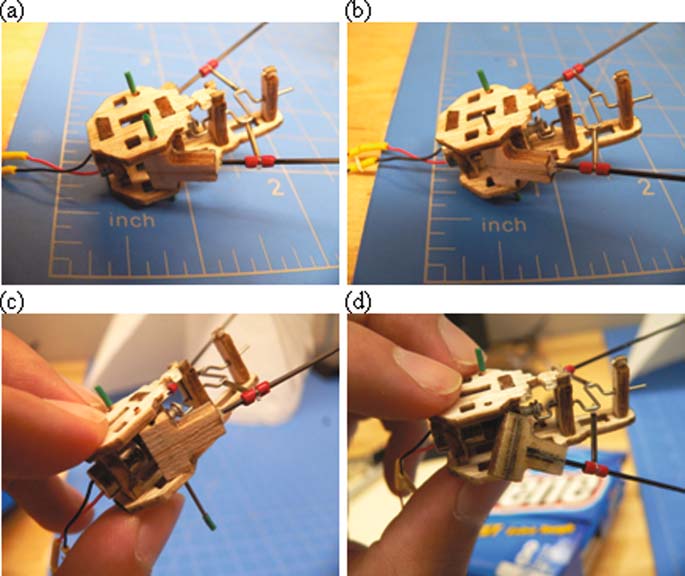
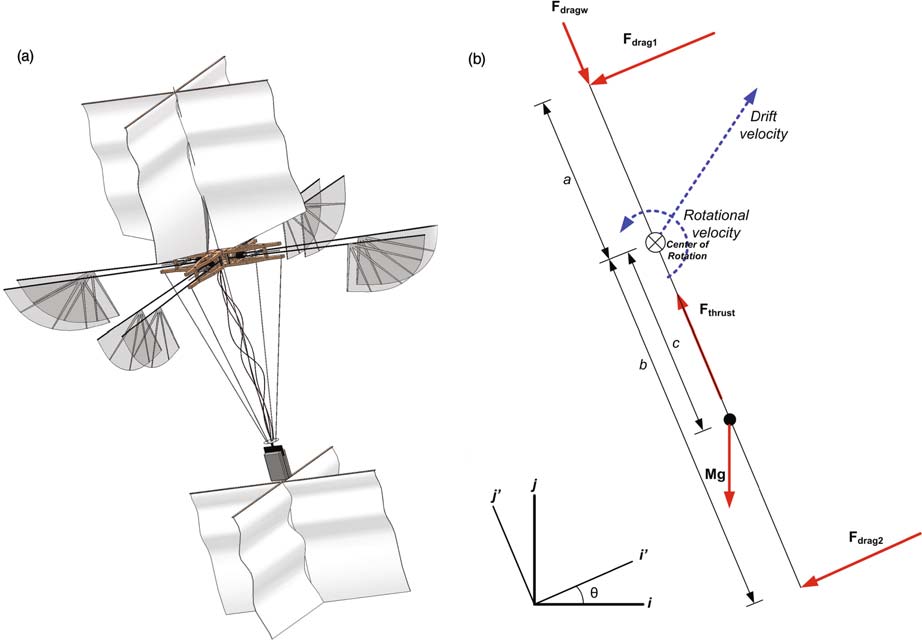
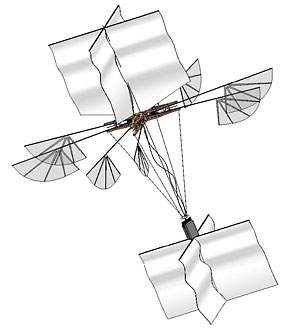
Two recent projects, DeLaurier’s Mentor Project and the TU Delft’s DelFly, have demonstrated untethered flapping based hovering flight. In an effort to push the field forward even further, we present here the first passively stable 24g hoverer capable of hovering flapping flight at a Reynolds number similar to insects (Re = 8,000). The machine takes advantage of the clap and fling effect, in addition to passive wing bending to simplify the design and enhance performance. We hope that this will aid in the future design of smaller machines, and shed light on the mechanisms underlying insect flight. |
|
|
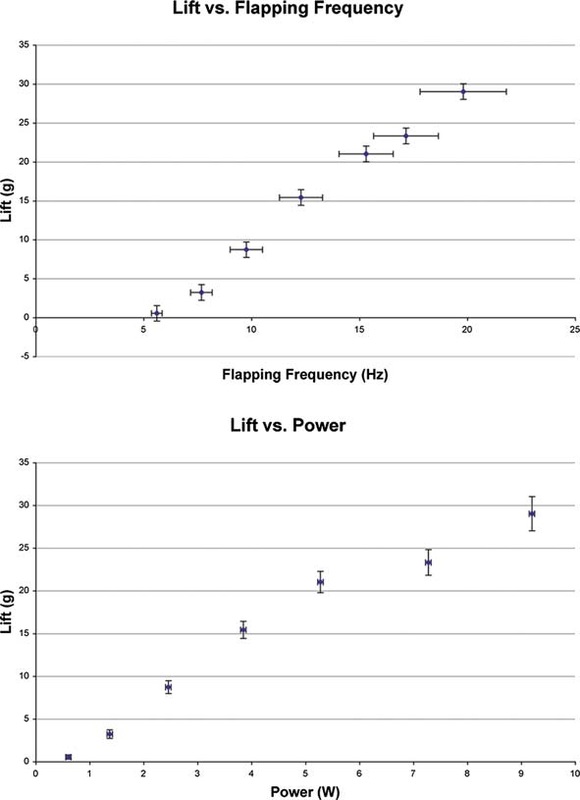
Lift is produced using a "clapping" behavior. A vertical wing swoops sideways, and as it sweeps it bends pushing air downwards. This flow produces lift. Our machine was capable of producing approximately 30g of lift, corresponding to about 4g lift per wing.
|
|
|


learn more |
Project participants |
Charlie Richter, Floris van Breugel, William Regan, Zhi Ern Teoh, Hod Lipson
|
Related Publications |
|
