|
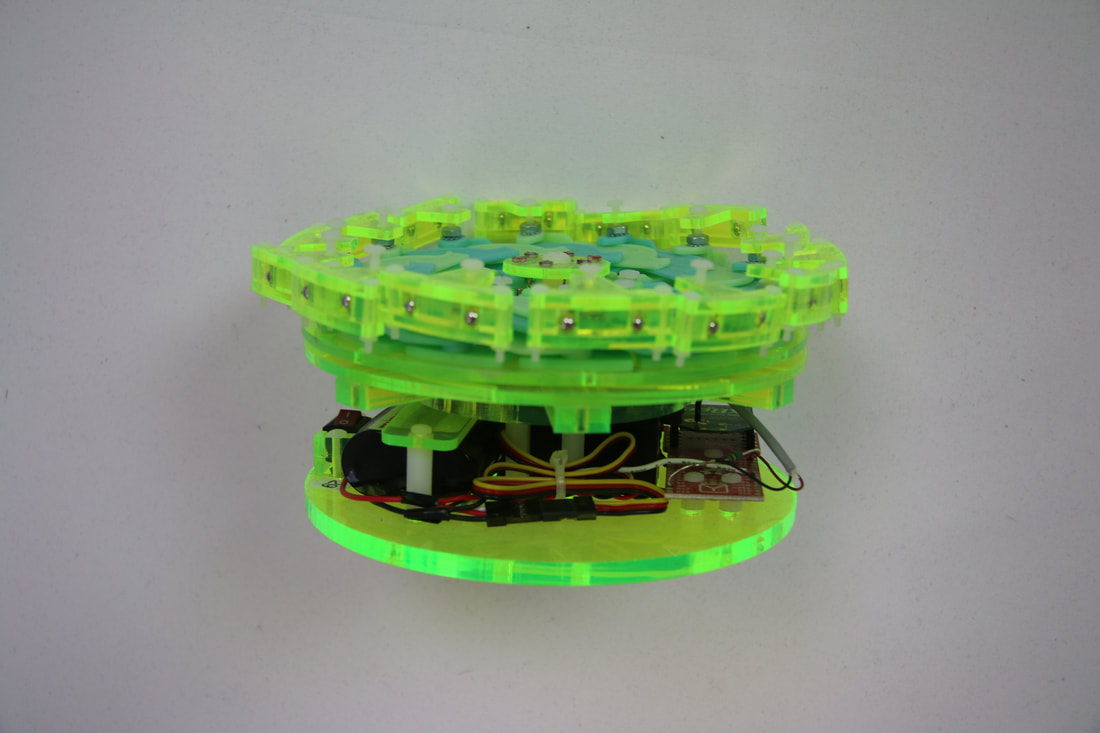
Biological organisms achieve robust high-level behaviors by combining and coordinating stochastic low-level components. In contrast, most robotic systems today comprise either monolithic mechanisms, or modular units with known positions and coordinated motions. Here we demonstrate a robotic system composed of many loosely coupled cells, each of them incapable of independent locomotion and without any individual identity or addressable position.
|
|
In our system, each cell is only capable of uniform volumetric oscillations, phase-modulated by a global signal. Despite this stochasticity and lack of direct control, we find that we are able to coordinate the overall behavior of the organism by exploiting statistical mechanics phenomena. We suggest that stochastic systems may offer an alternative approach to creating large-scale robust amorphous robotic systems that exhibit deterministic behavior despite their stochastic components.

learn more |
Source code:
|
Project participants |
Shuguang Li, Richa Batra, David Brown, Hyun-Dong Chang, Nikhil Ranganathan, Chuck Hoberman, Daniela Rus, Hod Lipson
|
Related Publications |
Li et al, (2019) Particle robotics based on statistical mechanics of loosely coupled components, Nature vol. 567, pages 361–365
|
